| Das Projekt RoboForce 2011/12 mit sehr viel Elektronik- sowie Softwarekonzepten ... |
|
|
Letztmalig dran rumgefummelt: 23.01.12 19:40:41 |
|
|
... soll uns den weiteren Vorstoß in
Naturwissenschaft und Technik erleichtern bzw. überhaupt erst einmal
ermöglichen. Hier wollen wir Elektronik und
Mechanik sowie Meßtechnik miteinander verbinden und dem Gymnasium das wieder geben, was ihm das offizielle
Bildungsangebot systematisch genommen hat: eine, wenn man so will,
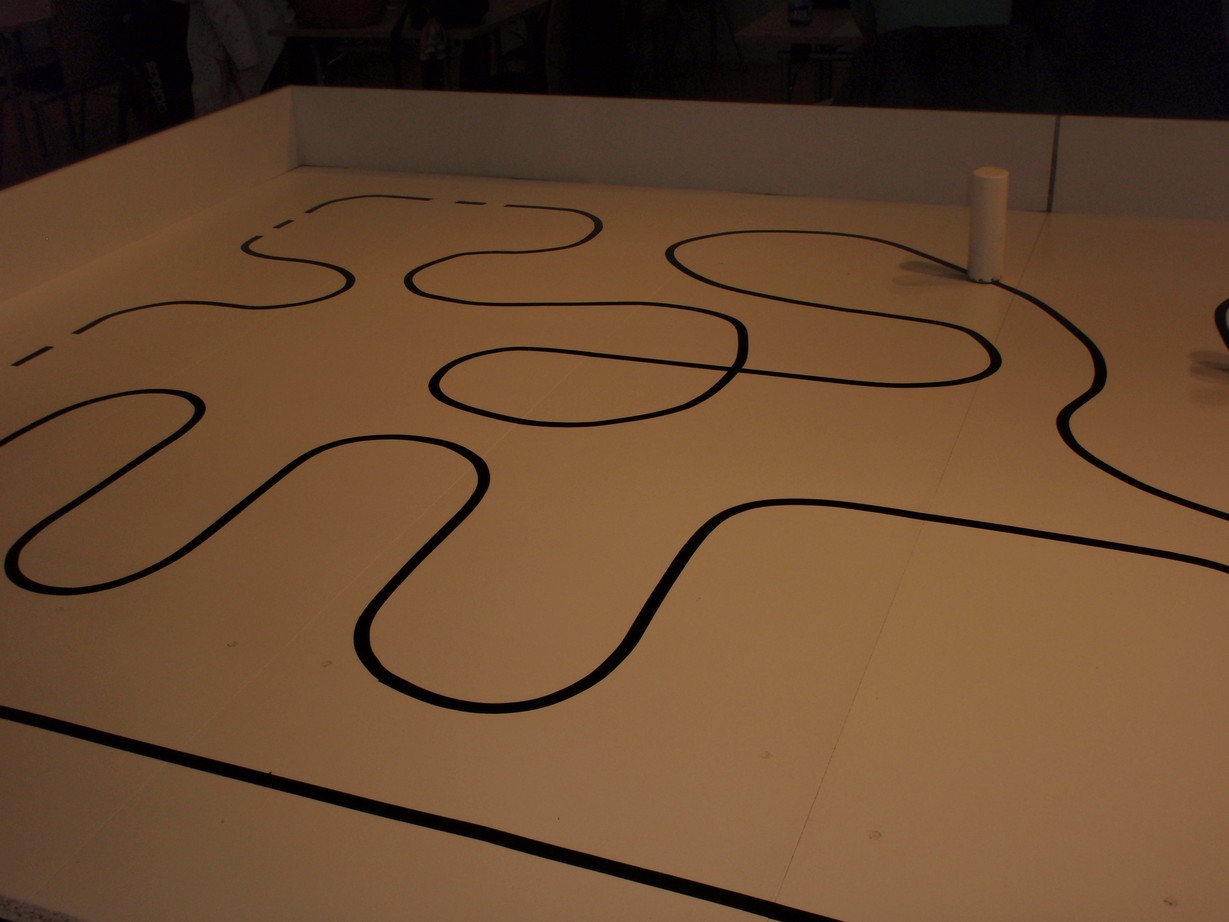
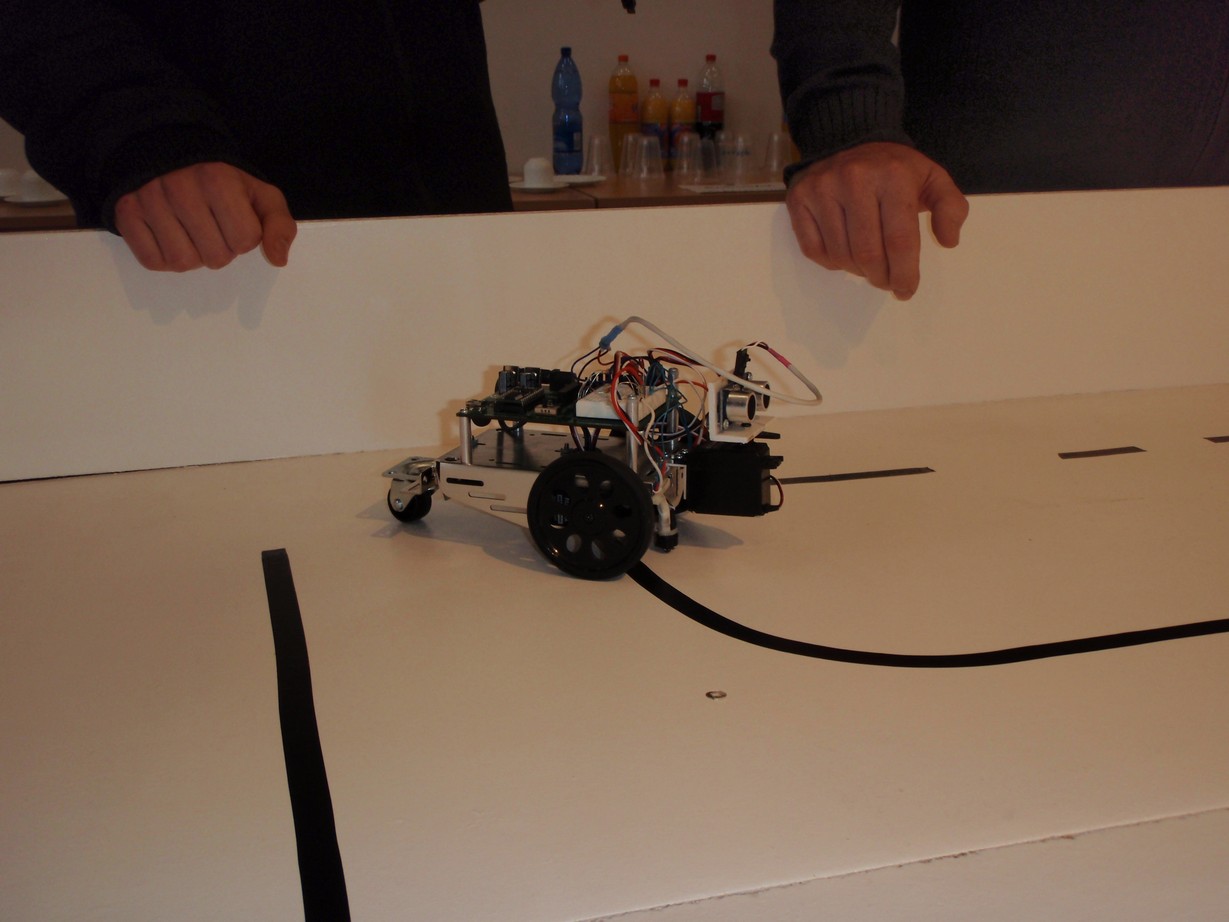
polytechnische Grundbildung. Momentan ist alles mit heißer Nadel gestrickt, ganz einfach deshalb, weil der "Roboking-Wettbewerb" über zwei Jahre hinweg nach seiner Auflösung eben ein Vakuum hinterlassen hat. Aber worum geht es überhaupt? Nun, im Jahre 2010 (bzw. 2011) sollen die Roboter der Schüler um die Wette einen nicht ganz einfachen Parkour durchfahren (das ist natürlich eine Simulation von Teilprozessen). |
||||||||
|
|||||||||
| 0. vormals der
Roboking- heute
ROBOSAX-Wettbewerb 1. Die AG 2. Verwendete Technik 3. Vorbereitungen auf den Wettbewerb 2011/12 mit dem GOLEM V 4. RoboSax-Vorrunden-Wettbewerb in Chemnitz im Januar 2012 5. RoboSax-Endrunden-Wettbewerb in Chemnit im Juli 2012 6. Verwandte Themen |
|||||||||
Teilnehmer:
Betereuer: |
|||||||||
|
| 1. Die AG |
|
|
|
|
|
Unsere AG hat sich bereits im Mai
2005 gegründet. Das Ziel ist und bleibt auch für 2012 die mehr oder
weniger erfolgreiche Teilnahme am Robo-Sax- Wettbewerb, welcher vom
Kepler-Gymnasium Chemnitz ins Leben gerufen wurde und welcher von der
TU-Chemnitz maßgeblich mit
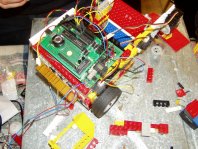
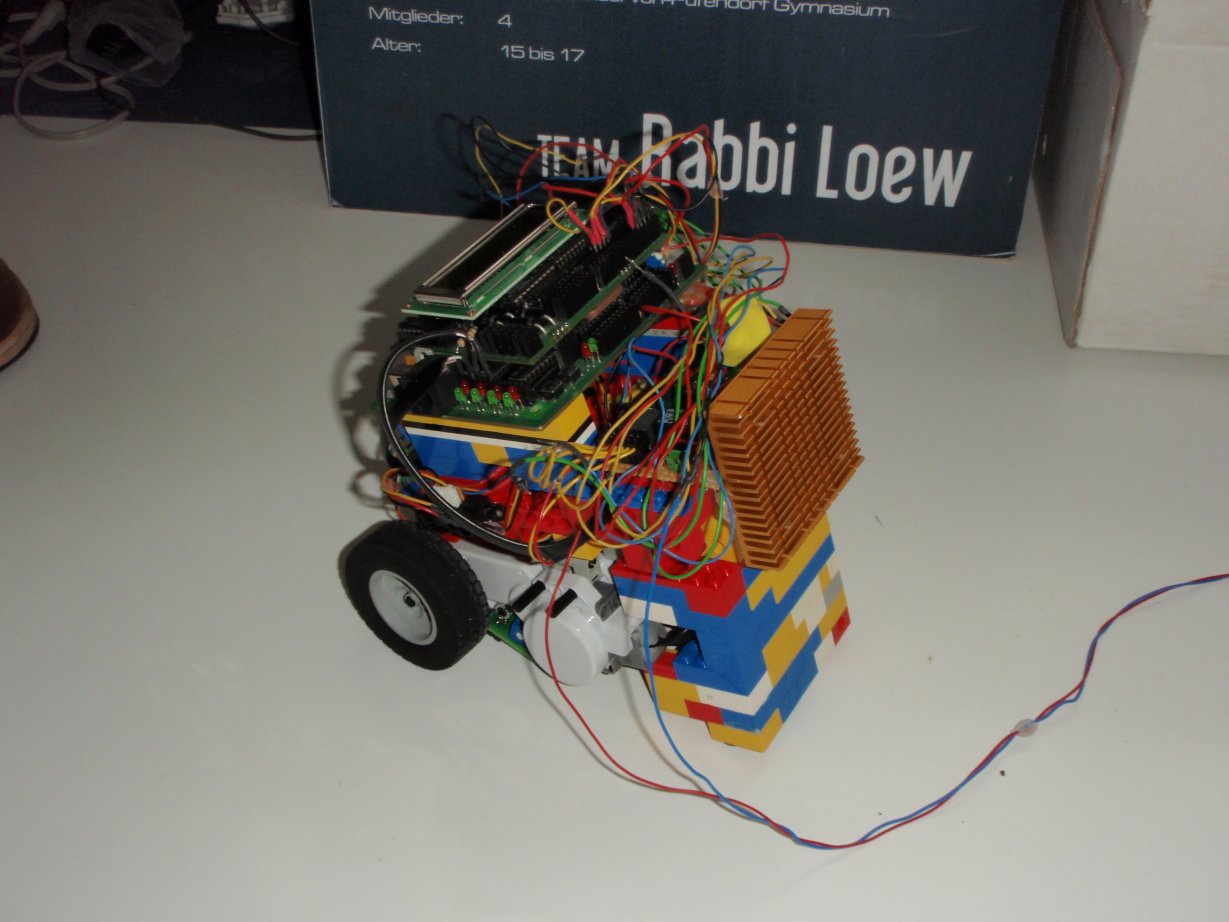
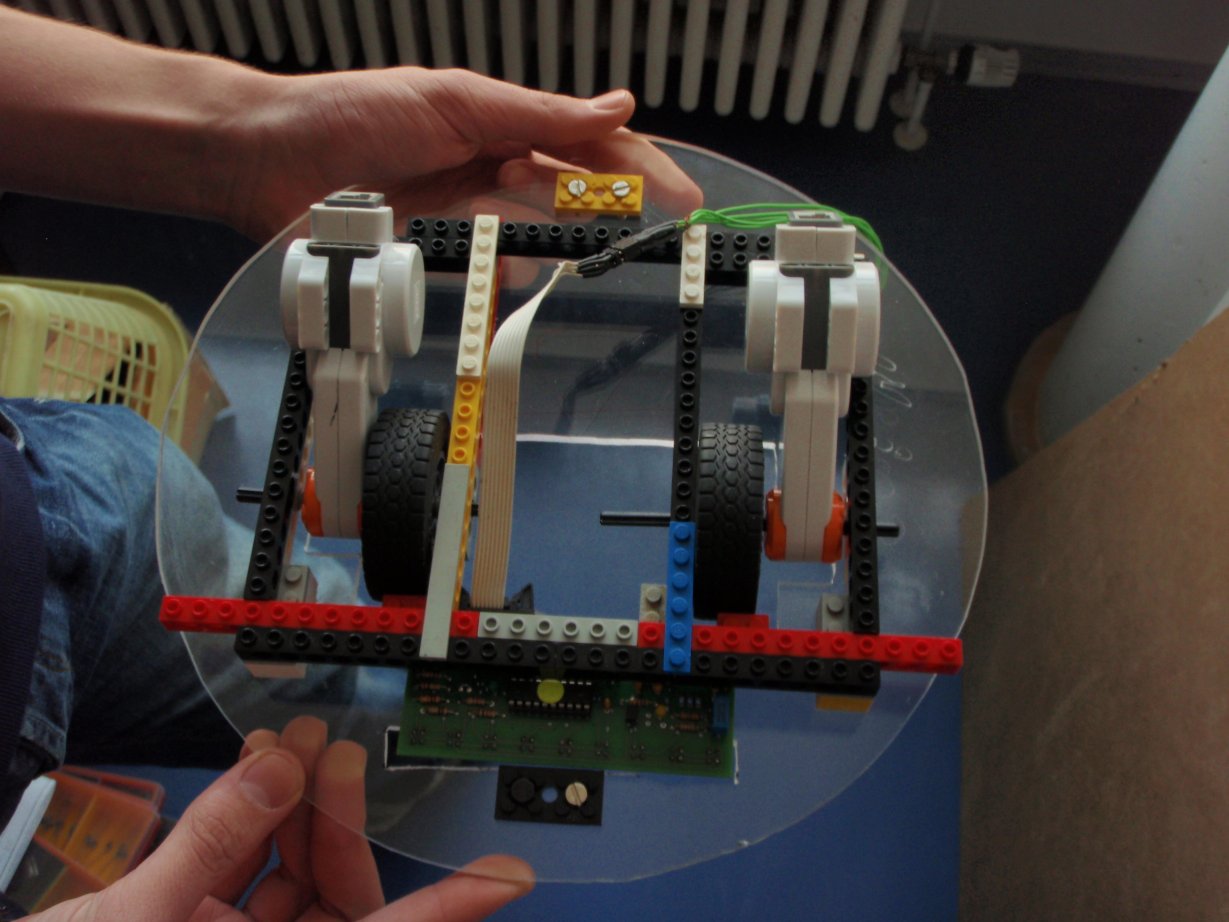
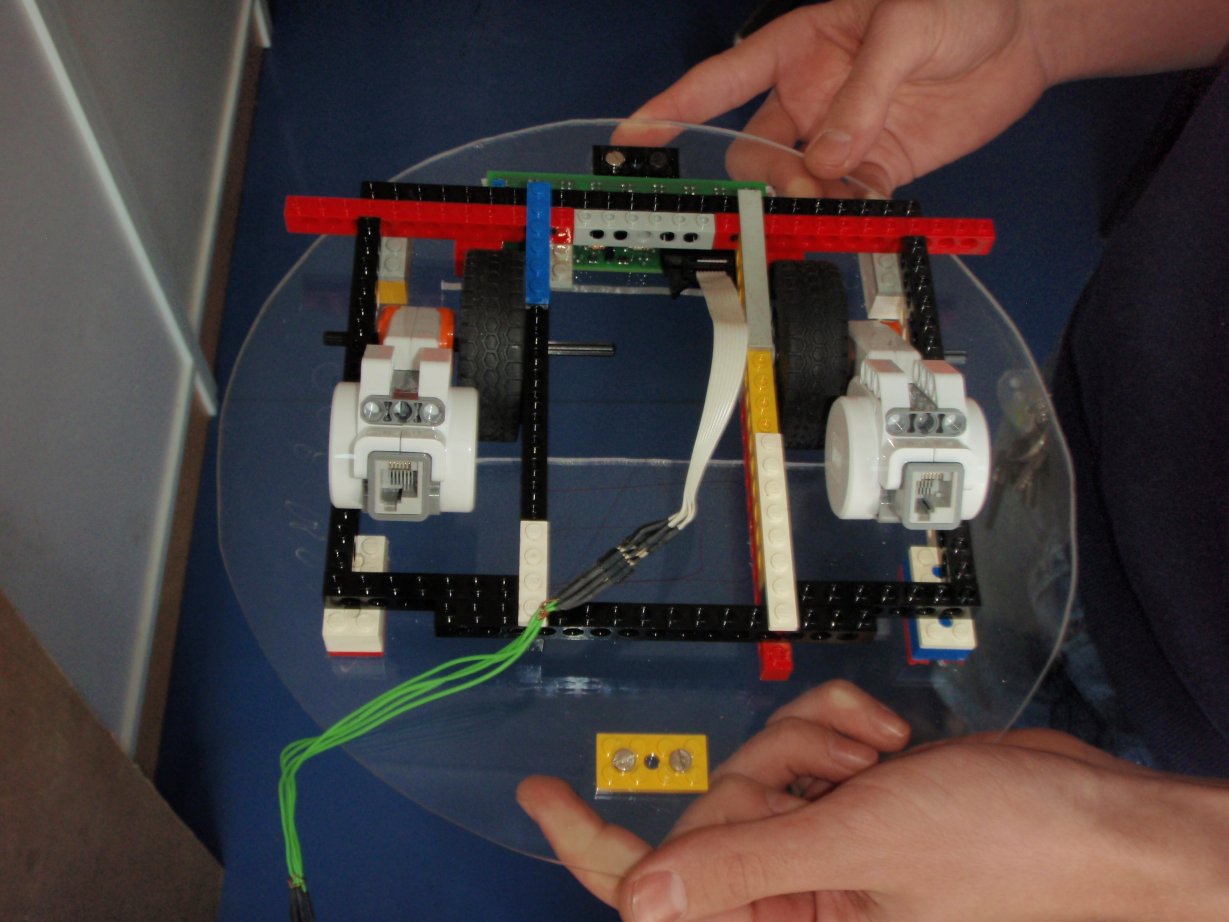
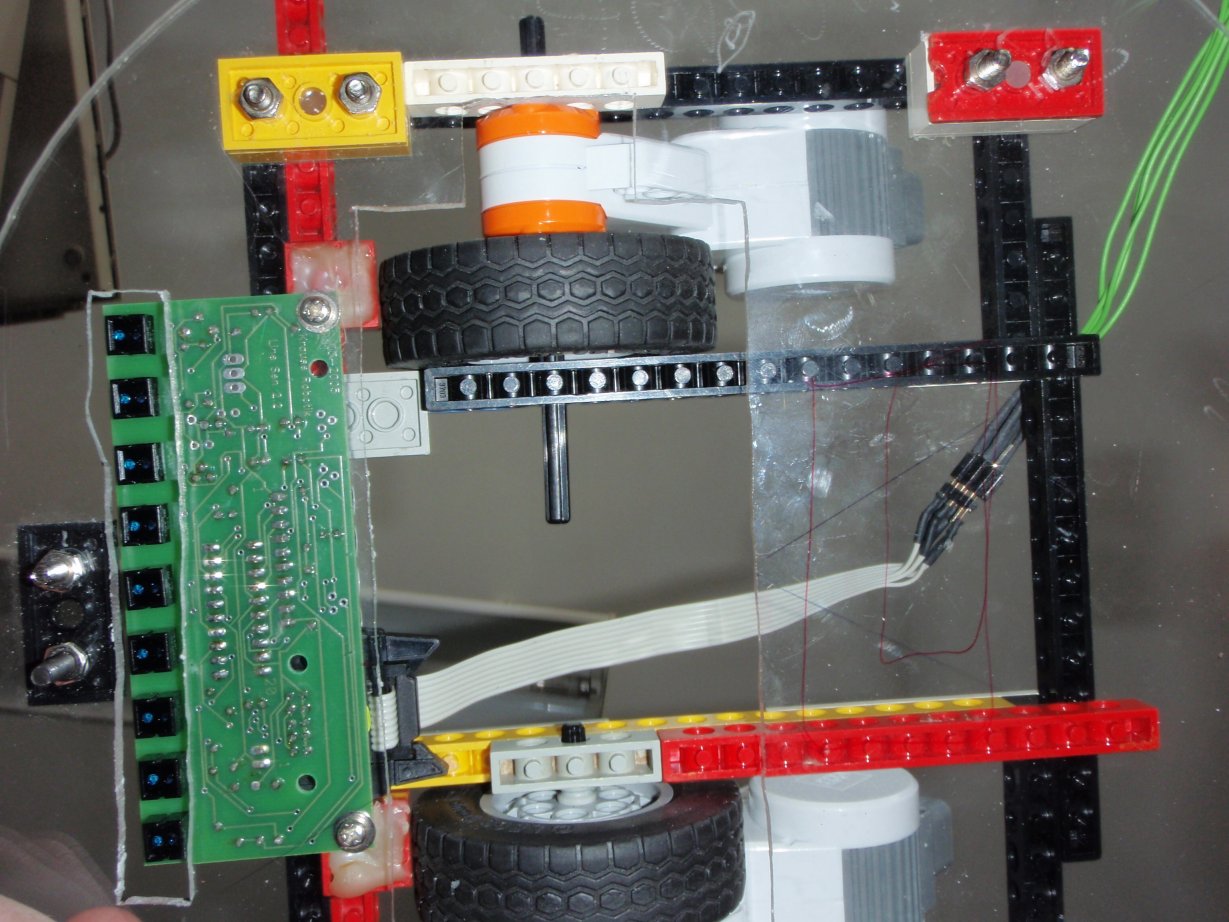
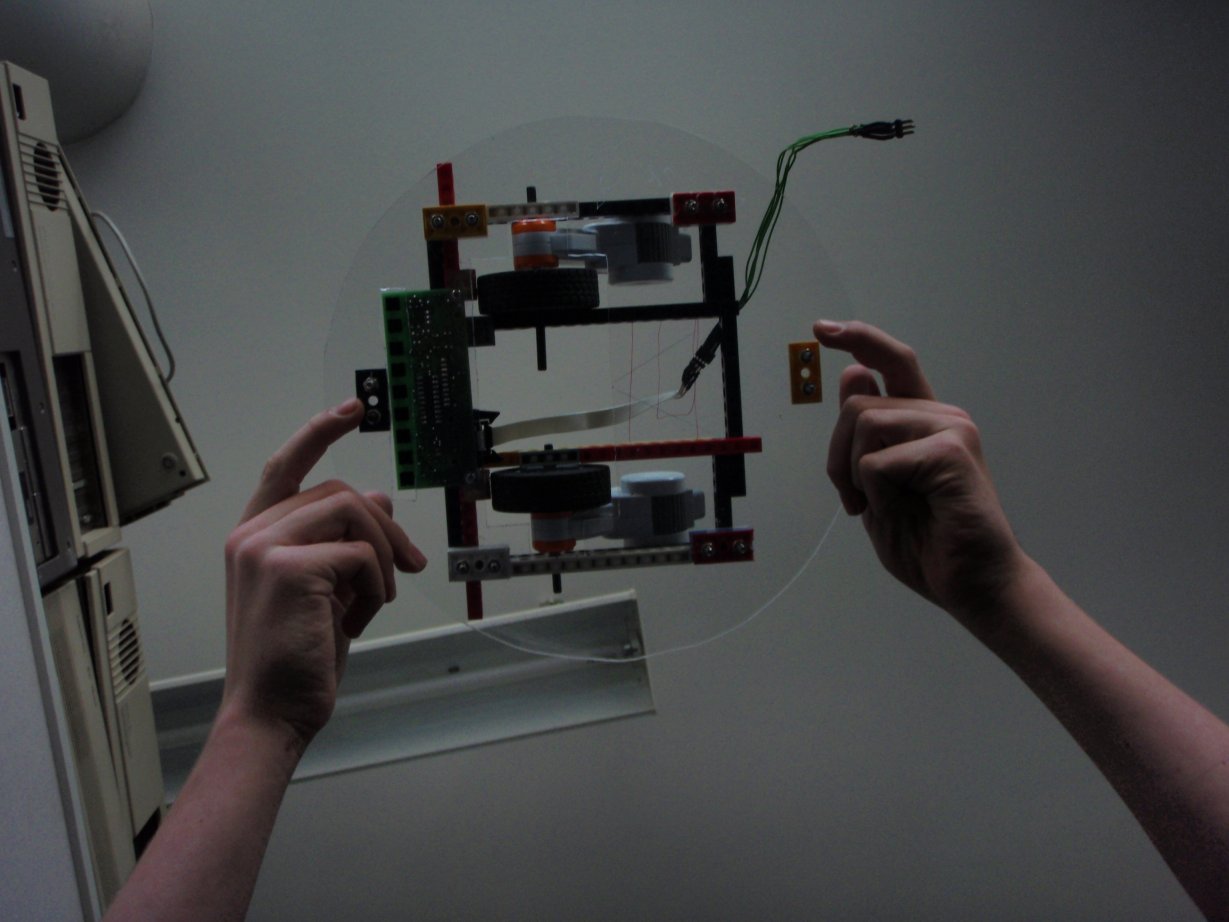
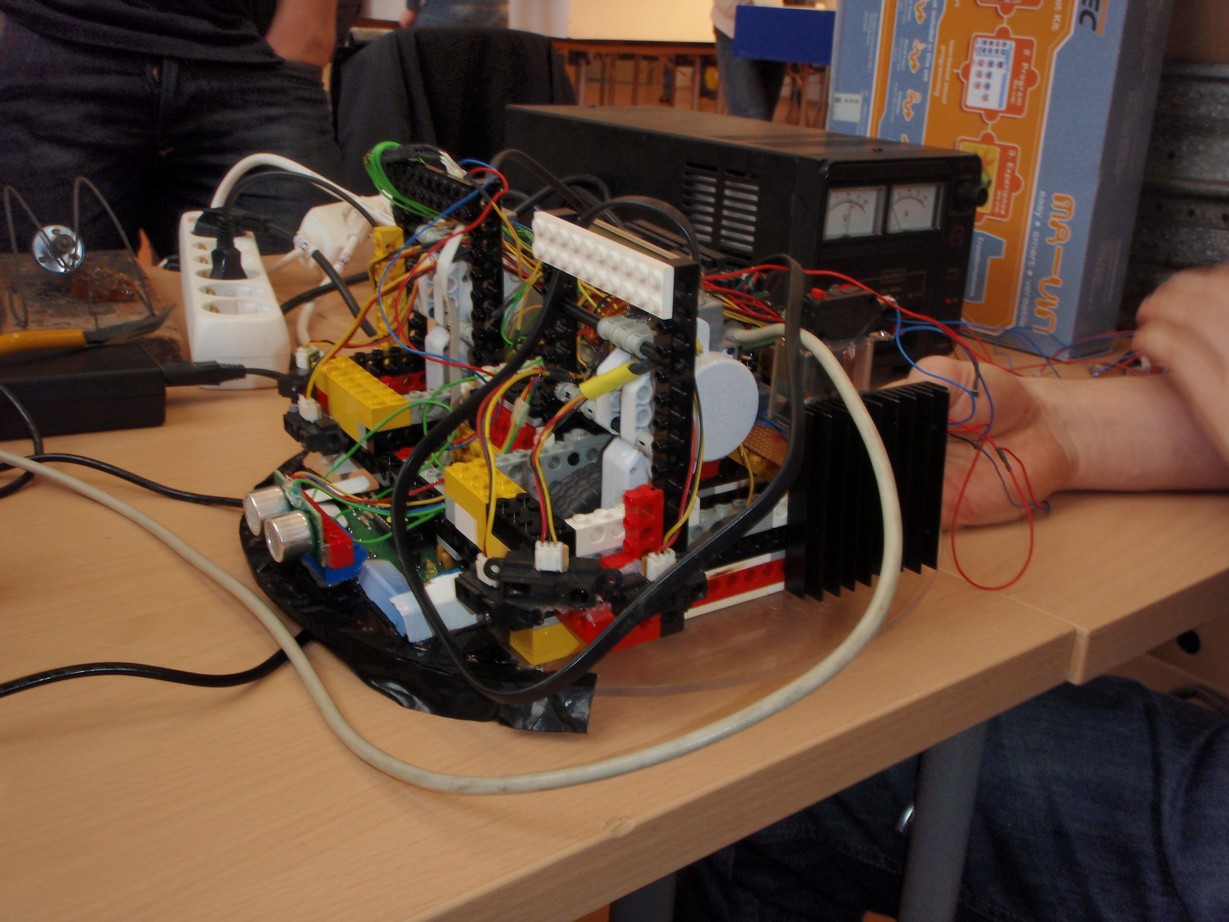
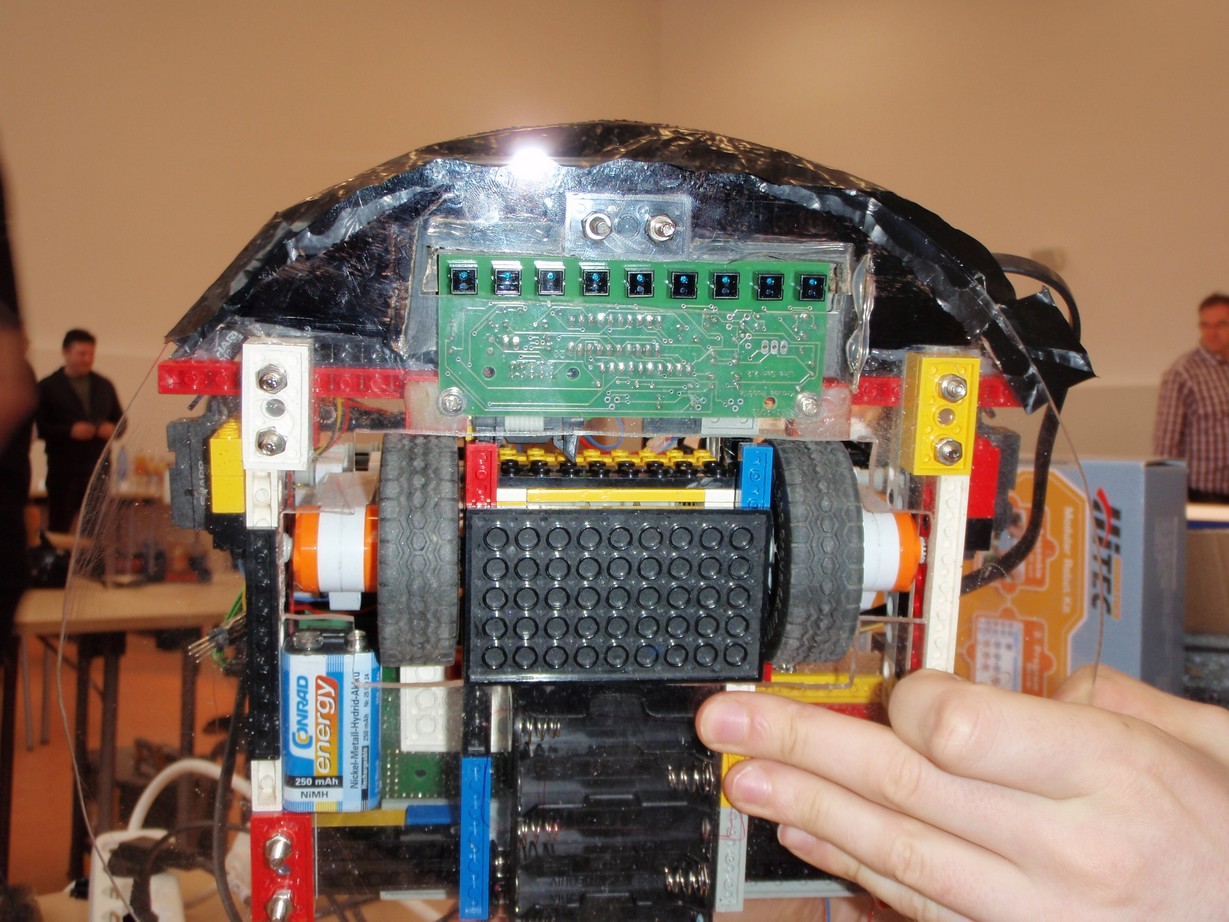
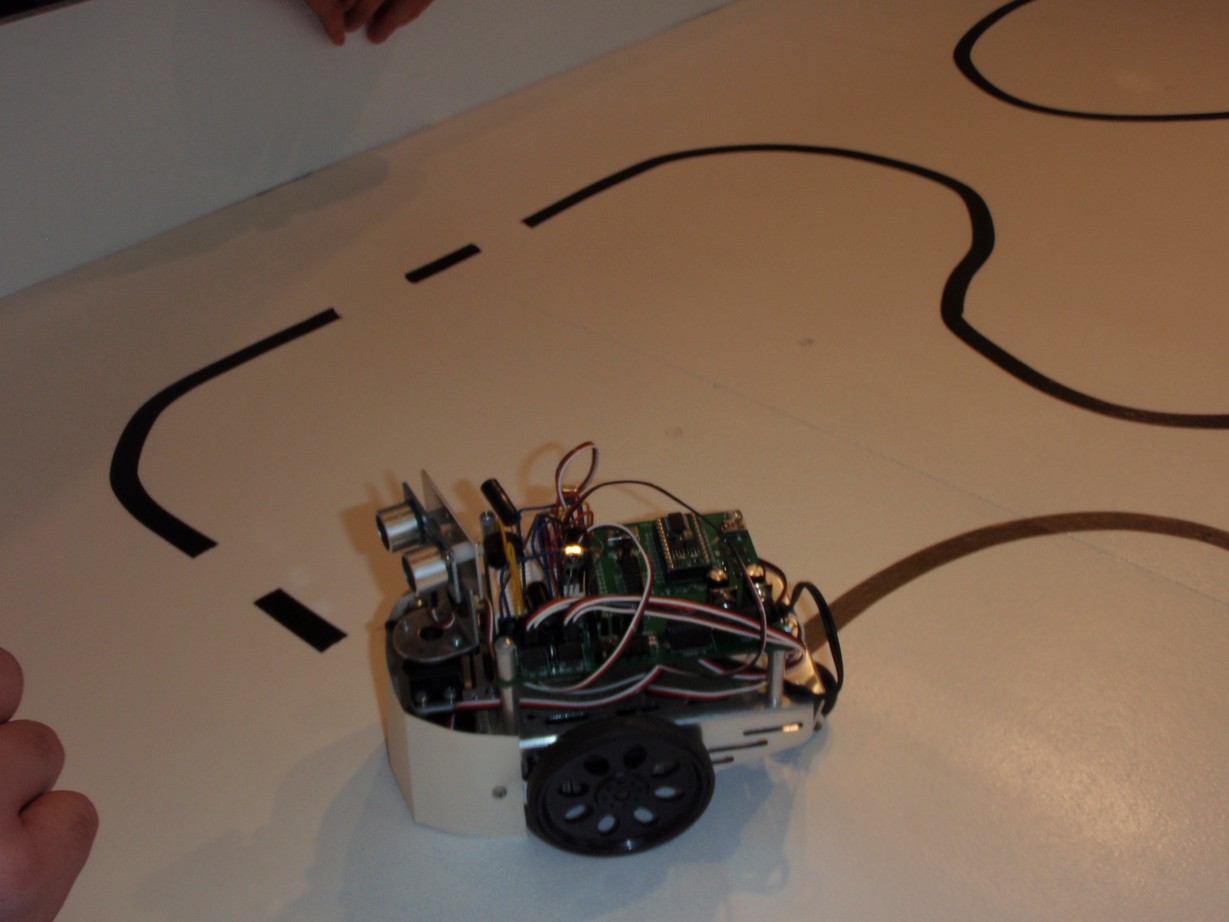
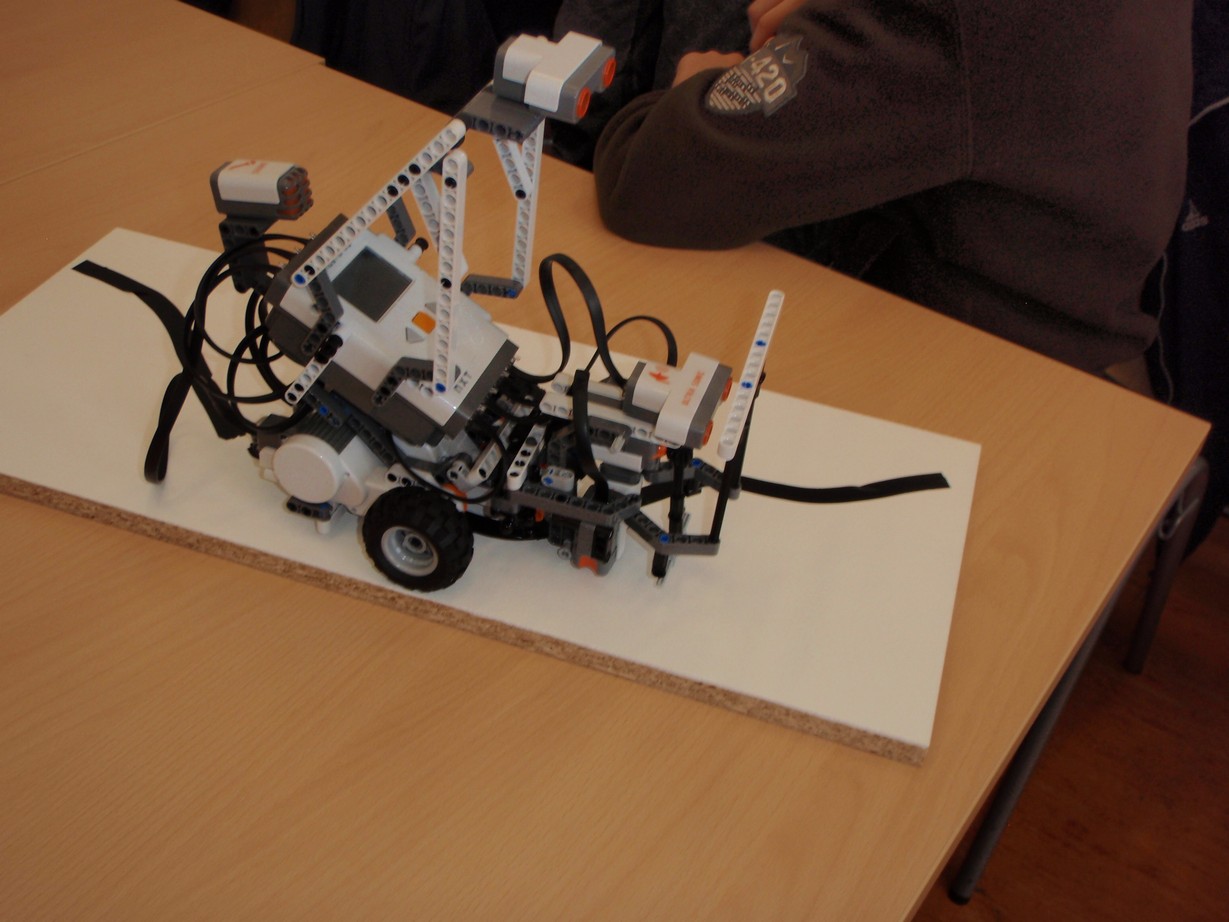
unterstützt wird. Nicht zuletzt aus Kostengründen haben wir uns entschieden, den Team-Namen "Roboforce" für die Teilnahme an Wettkämpfen beizubehalten - erstens ist er nicht schlecht und zweitens müssen nur zwei T-Shirts mit bereits vorhandenem Datenmaterial bedruckt werden. Auch ist immer wieder hervorzuheben, dass in dieser Königsdisziplin der Elektronik und Software-Entwicklung der Spaß und das Lernen im Vordergrund stehen, jeder Bezwinger großer Gipfel hat vormals auf einem kleinen Steinhügel angefangen und ist dabei mehr als einmal hingefallen - aber wie sagte bereits Winston Churchill (eines meiner heimlichen Leitbilder: "... Du musst im Leben einmal mehr aufstehen, als hinfallen!" - und recht hat er, der "Alte"! Zwischenzeitlich arbeiten wir streng genommen mit zwei Teams und das auf verschiedenen Plattformen. Nach wie vor ist der Oberhammer ein Eigenbau-Roboter. Dabei kombinieren wir so gut es eben mit bescheidenen finanziellen Mitteln geht, Plexi-Platten sowie LEGO-Bausteine und vor allem dessen hervorragende Getriebeelemente. |
||||||||
|
|||||||||
|
|||||||||
Was vorher geschah, wie vorab gesagt -
aktiv sind wir auch im Wettkampfbetrieb seit 2005 ...
|
|||||||||
| 2. Verwendete Technik - unverändert im Konzept |
|
|
|
|
|
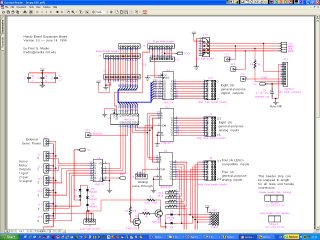
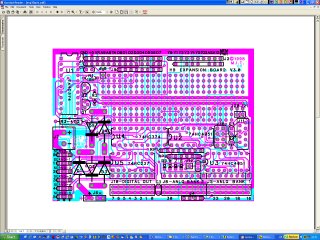
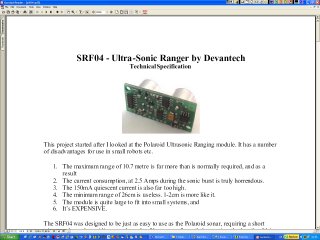
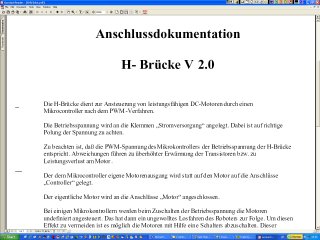
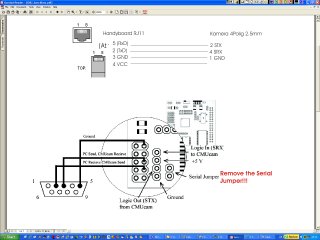
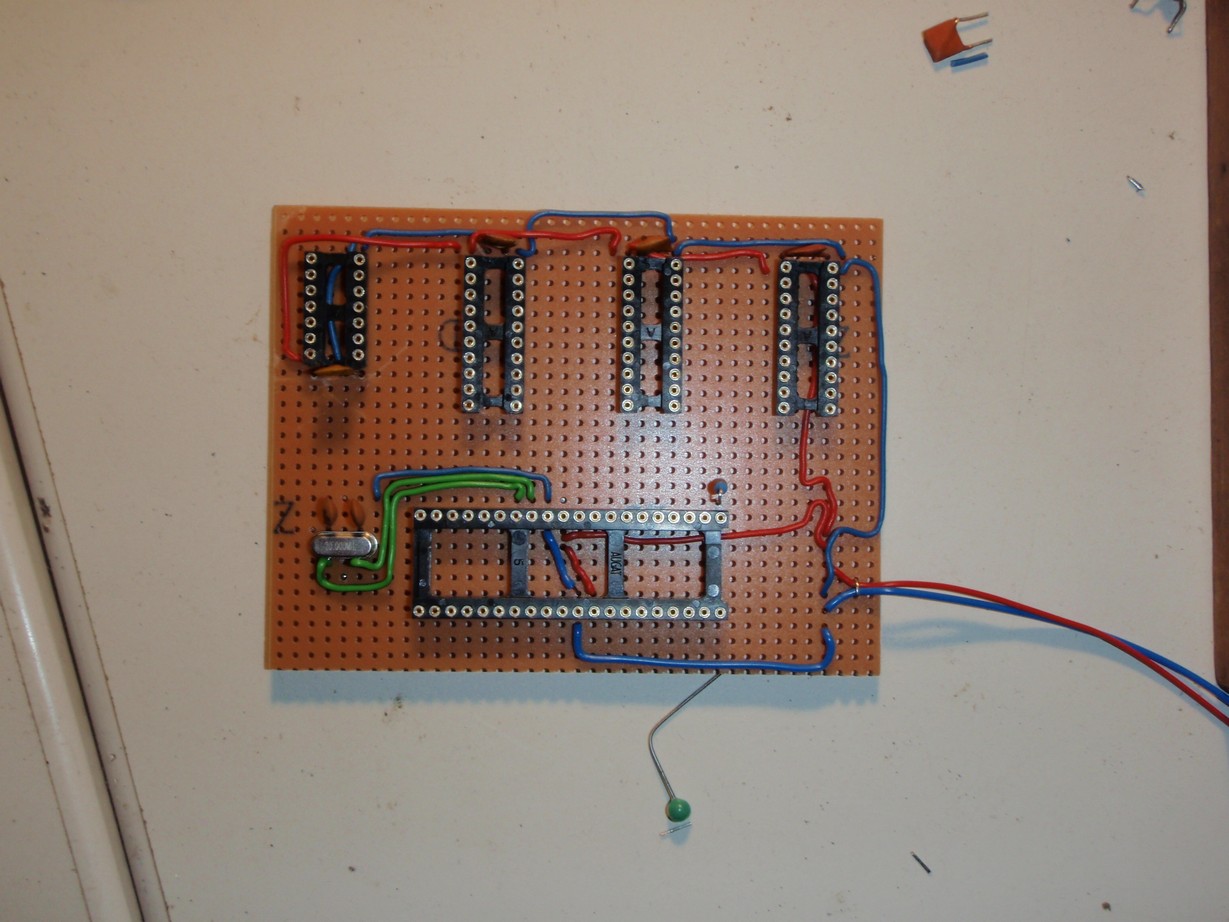
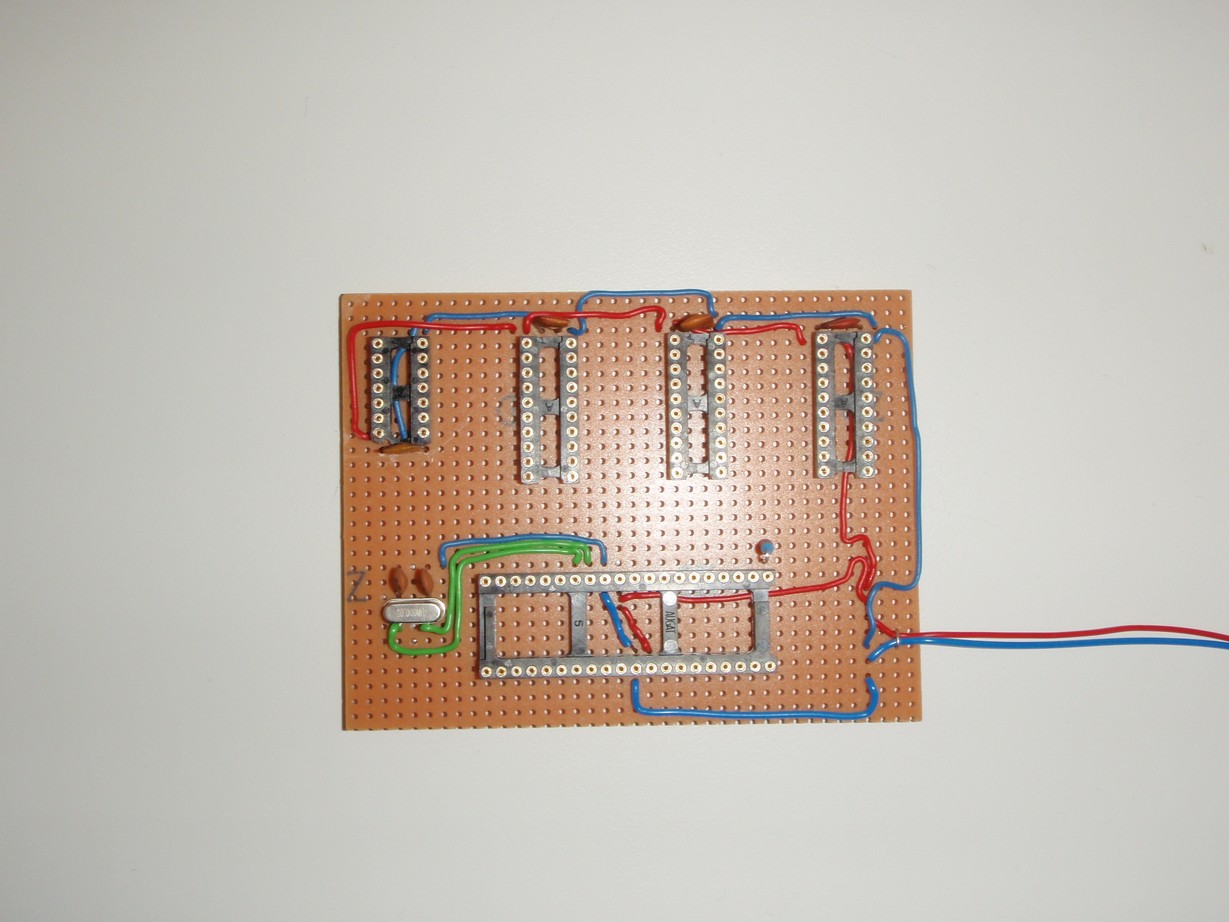
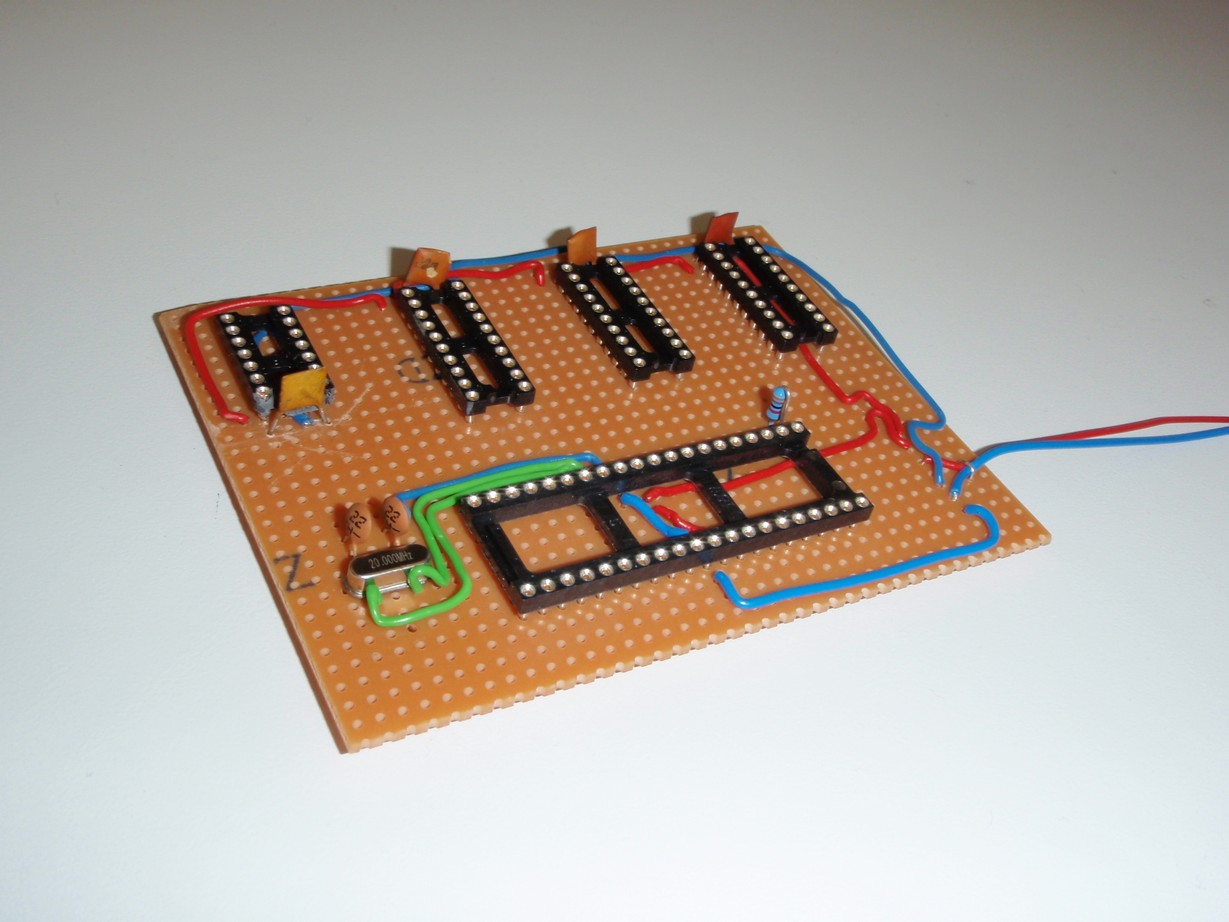
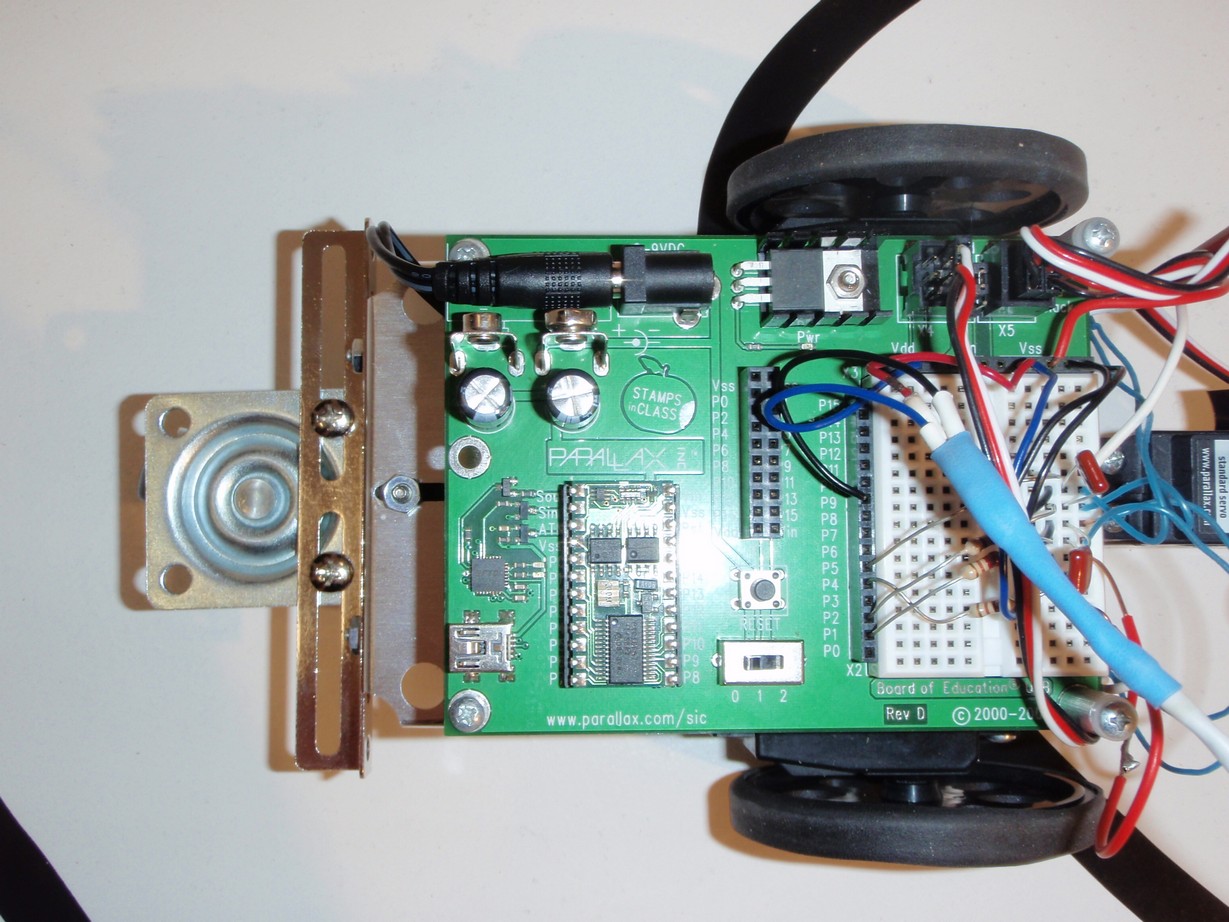
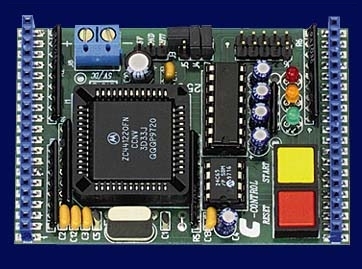
Inzwischen kennen wir uns in der eingesetzten Technik sowie der zugehörigen Programmiersprache ziemlich gut aus und können auch die entsprechenden Ports sowie Features des Handybords nutzen. Vorteilhaft sind für kleine Roboterbastler Kenntnisse in Mechanik (Getriebetechnik, Statik), Elektronik, Mikroprozessortechnik sowie Programmierung - kurz: eigentlich alles, was zur Informatik gehört. Und weil alles technisch beim Alten bleibt, hier nochmals die Links auf unsere eingesetzte Hardware | |||||||||||||||||||||
|
||||||||||||||||||||||
| 3. Vorbereitungen auf den Wettkampf 2011 mit A- und B-Bot |
|
|
|
|
|
Der RESTART ist insgesamt nunmehr als gelungen zu bezeichnen, wenngleich eine Vielzahl von Aufgaben vor uns liegen, welche auch noch gelöst werden müssen. So bleibt eine wichtige Angelegenheit, die Finanzen in Ordnung zu bringen - das heißt, beizeiten die entsprechenden Anträge einzureichen. Momentan werden wir vom Förderverein gestützt. | ||||||||||||||||||||
|
|||||||||||||||||||||
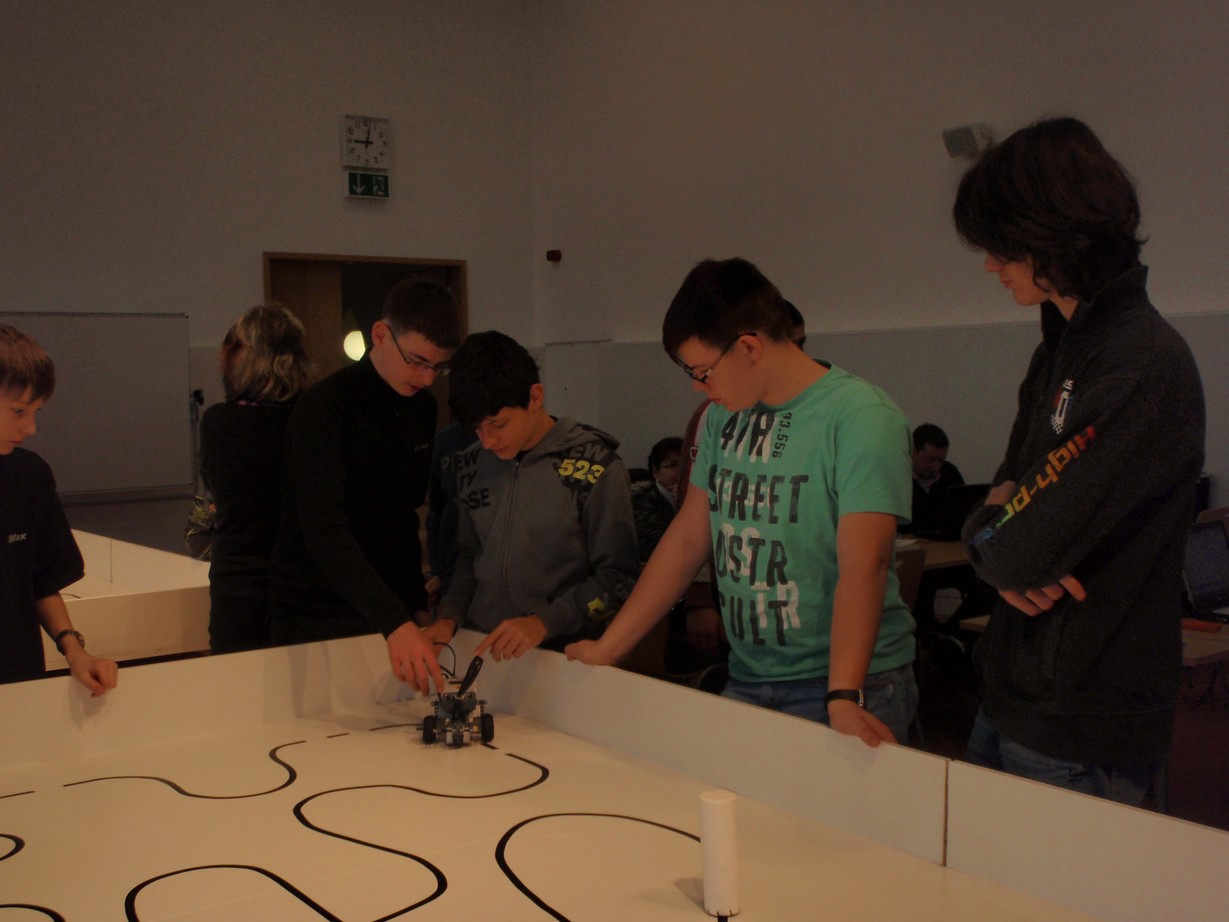
| 4. RoboSax-Vorrunden-Wettkampf in Chemnitz |
|
|
|
|
|
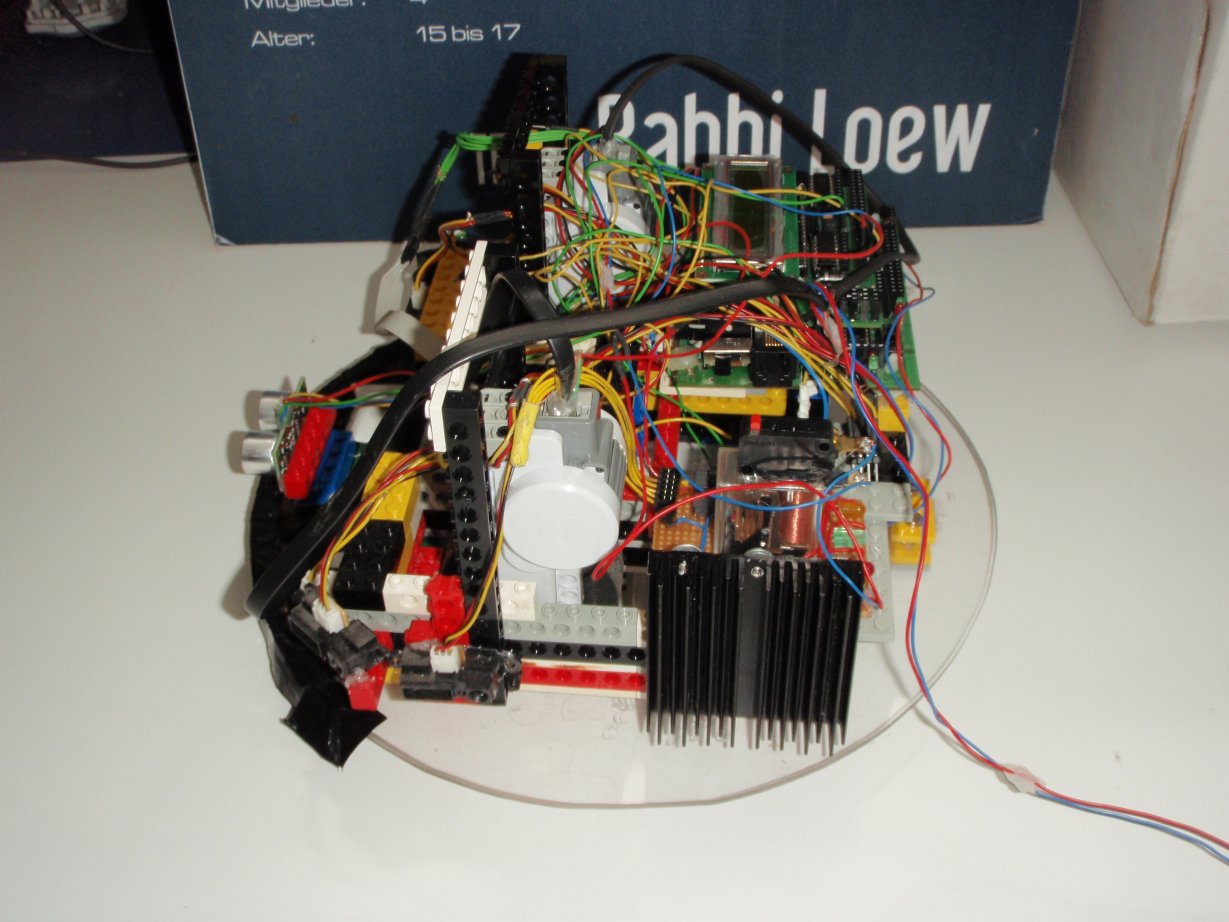
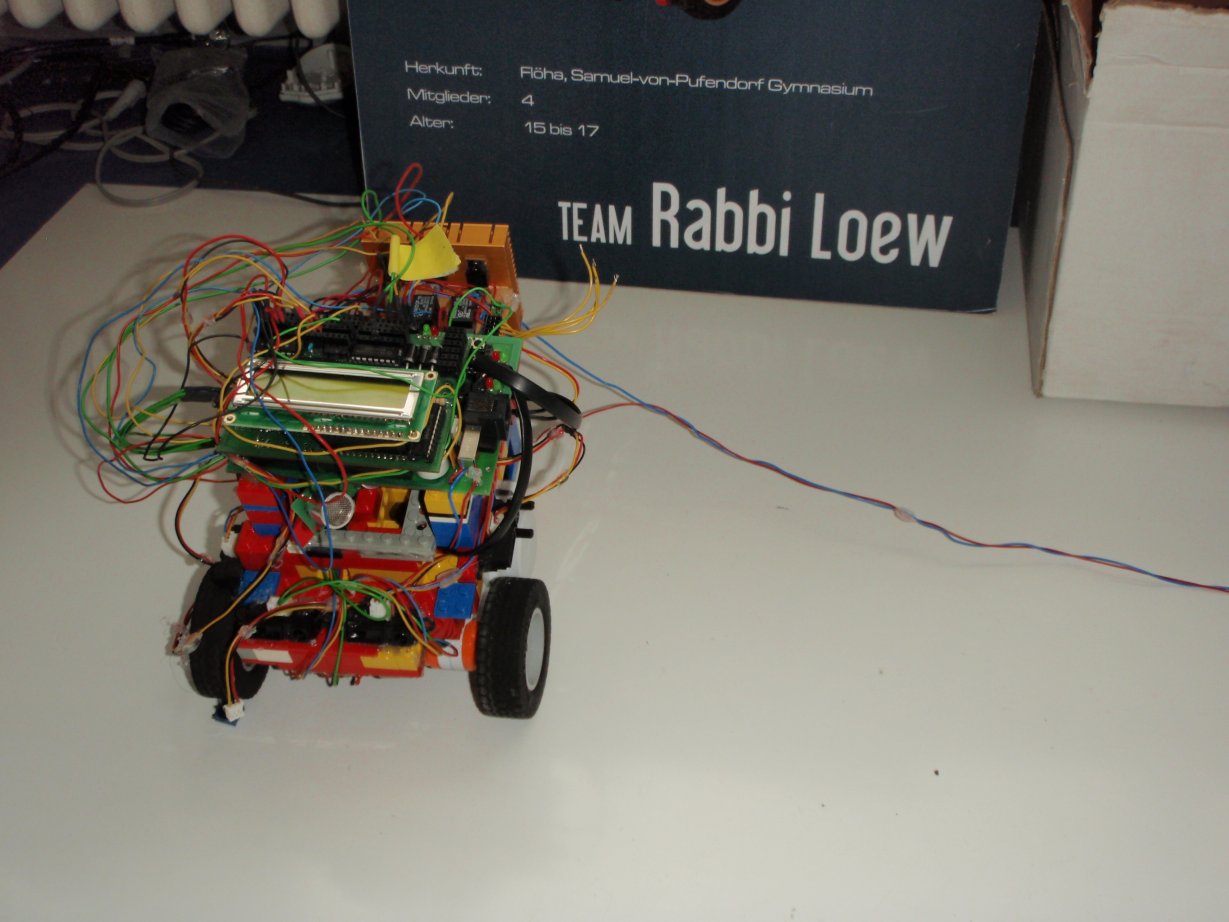
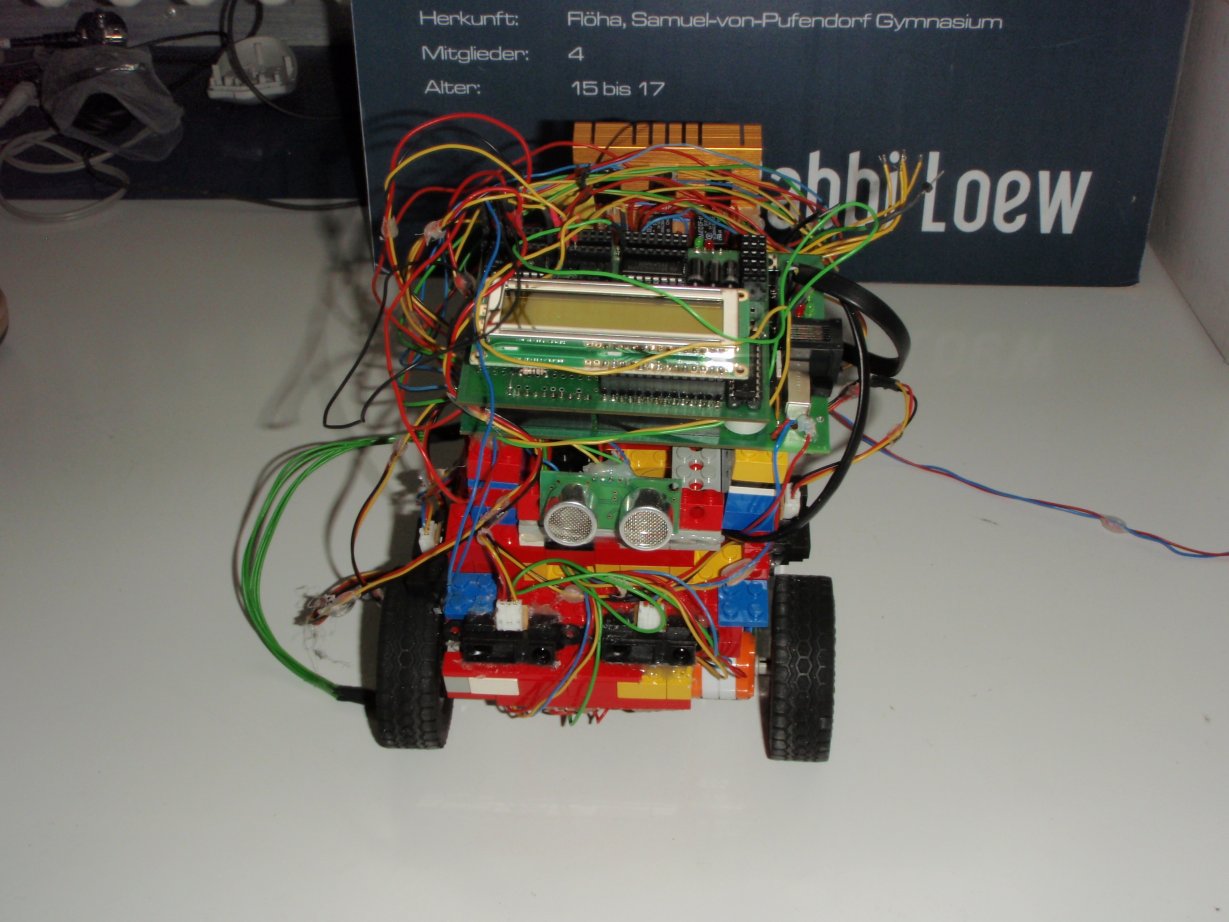
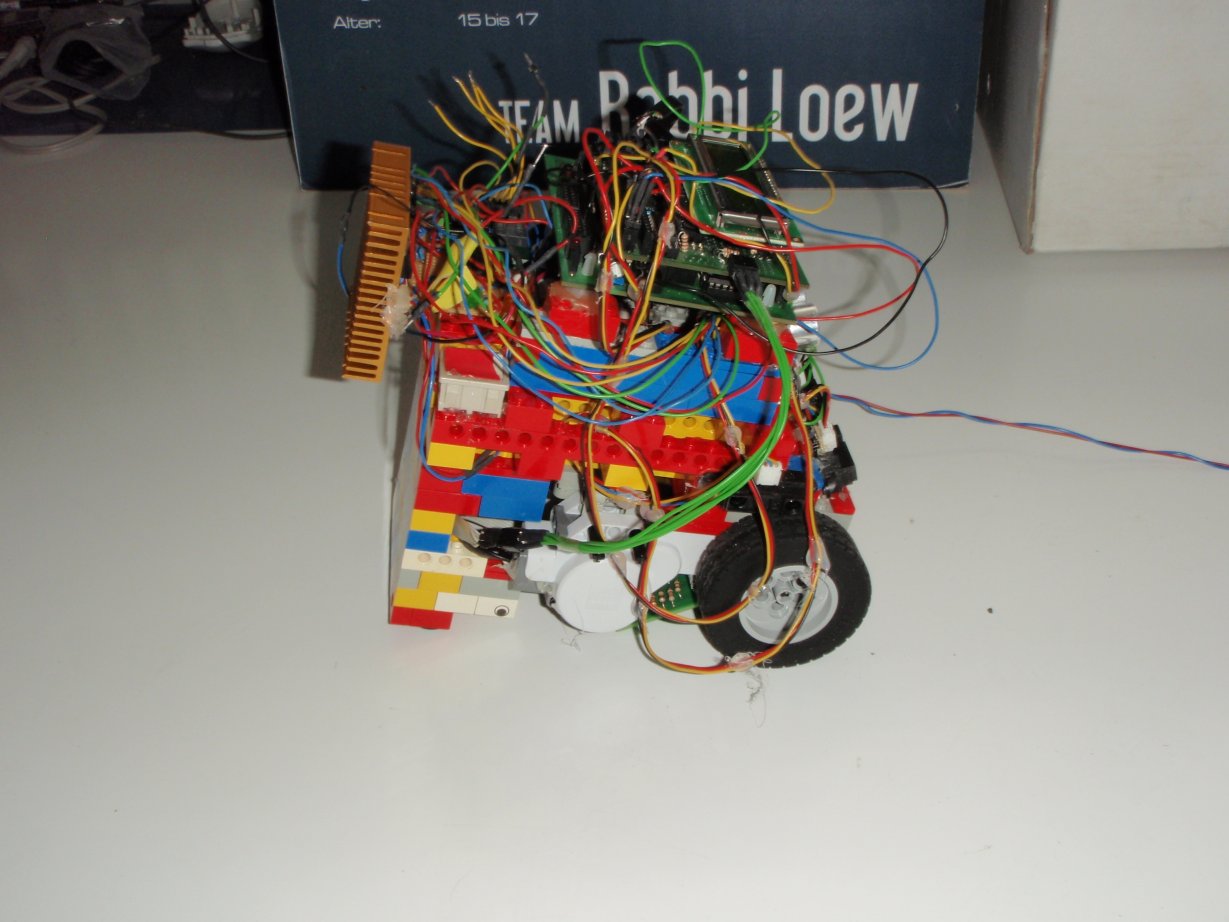
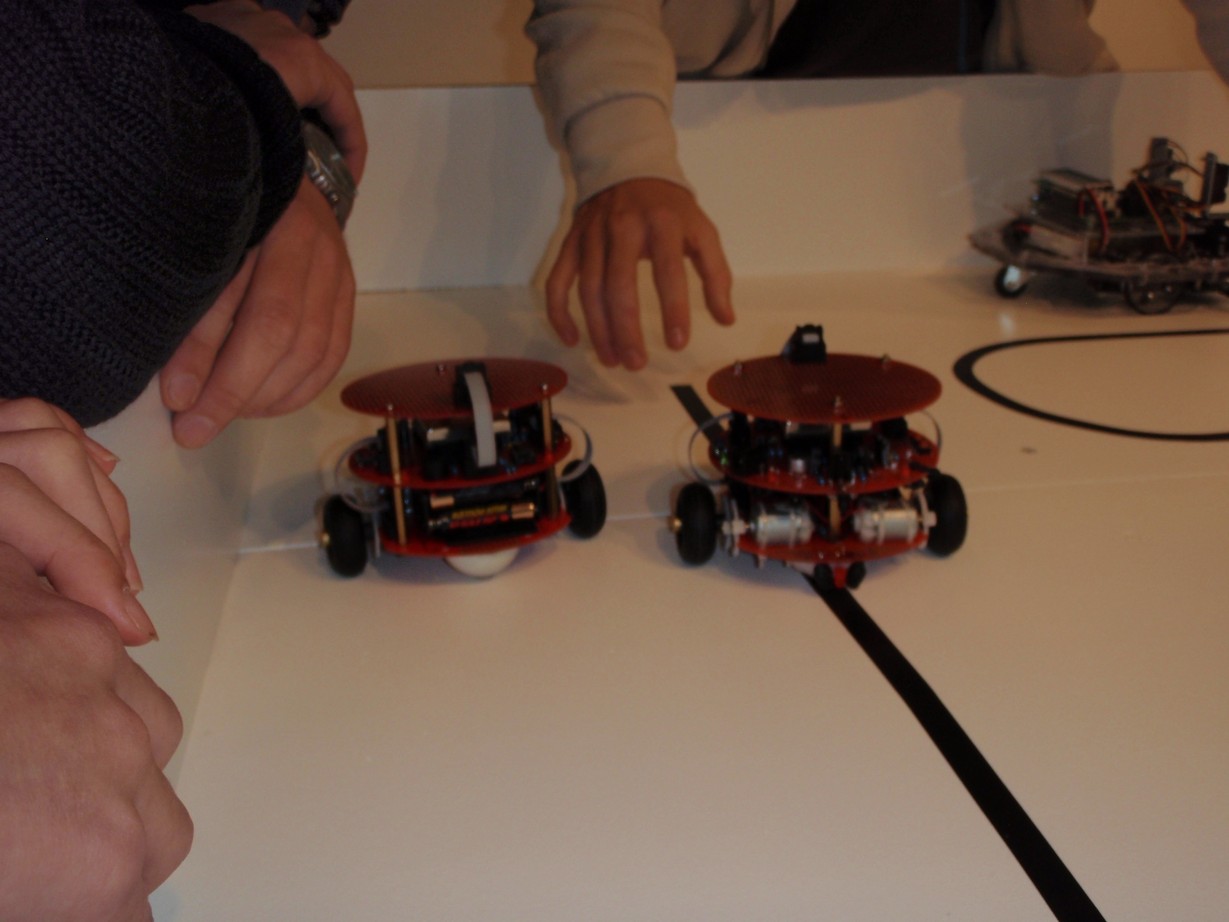
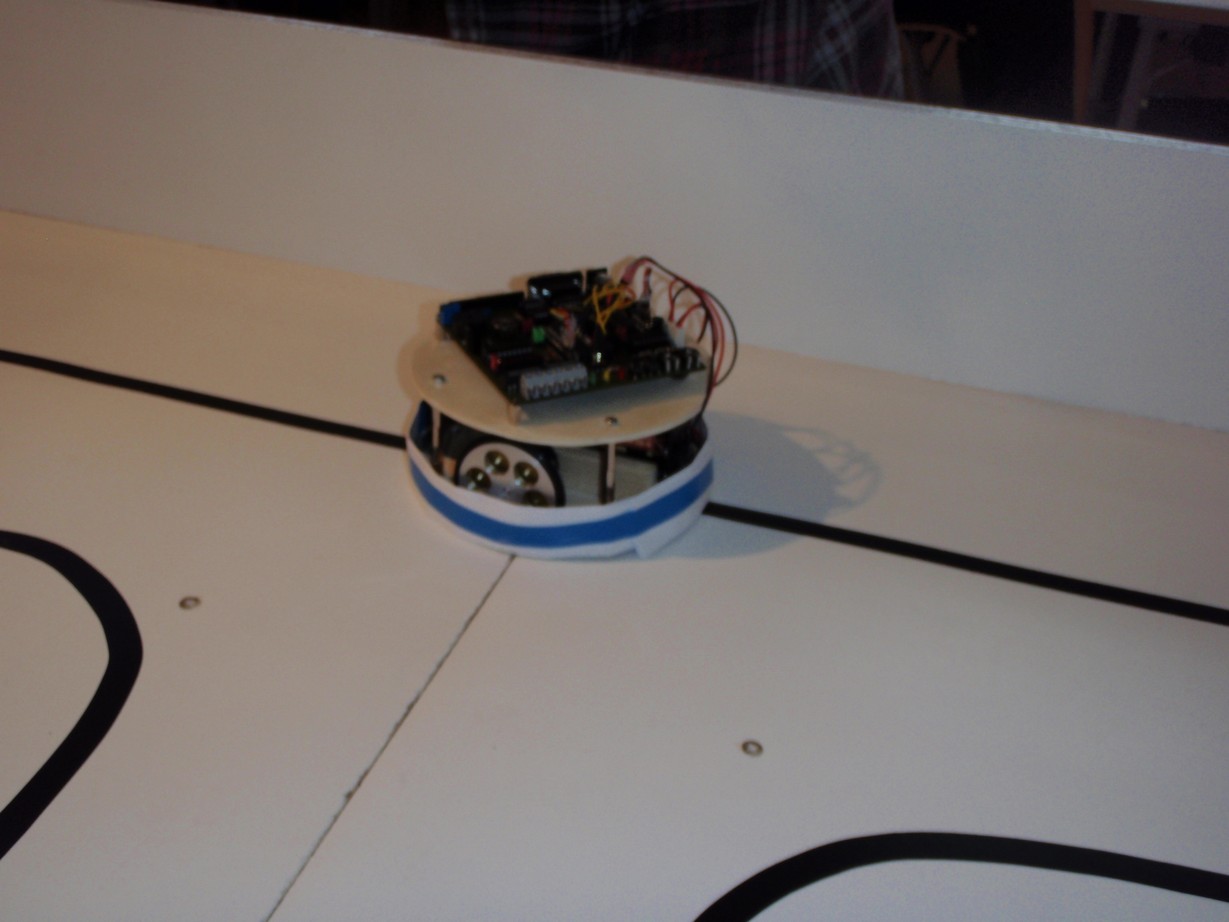
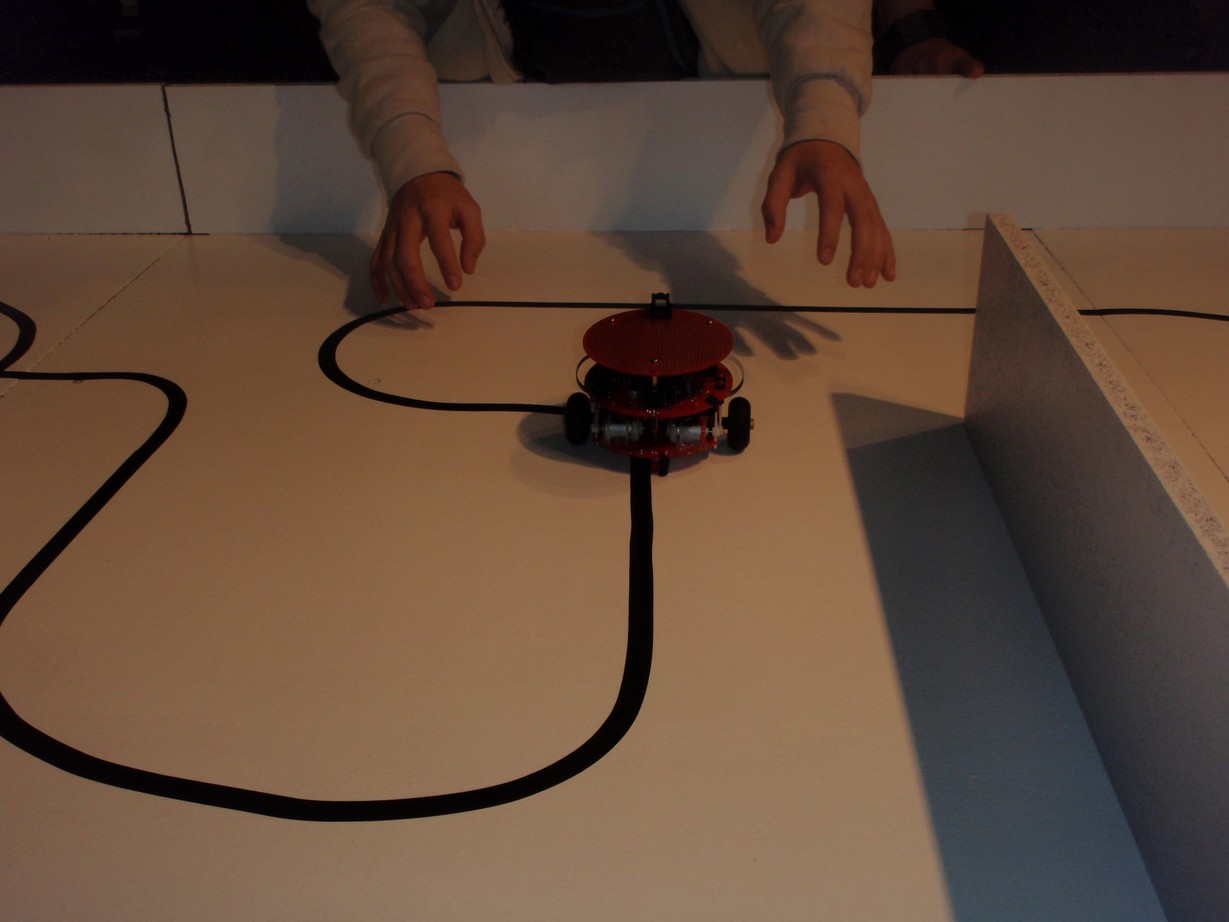
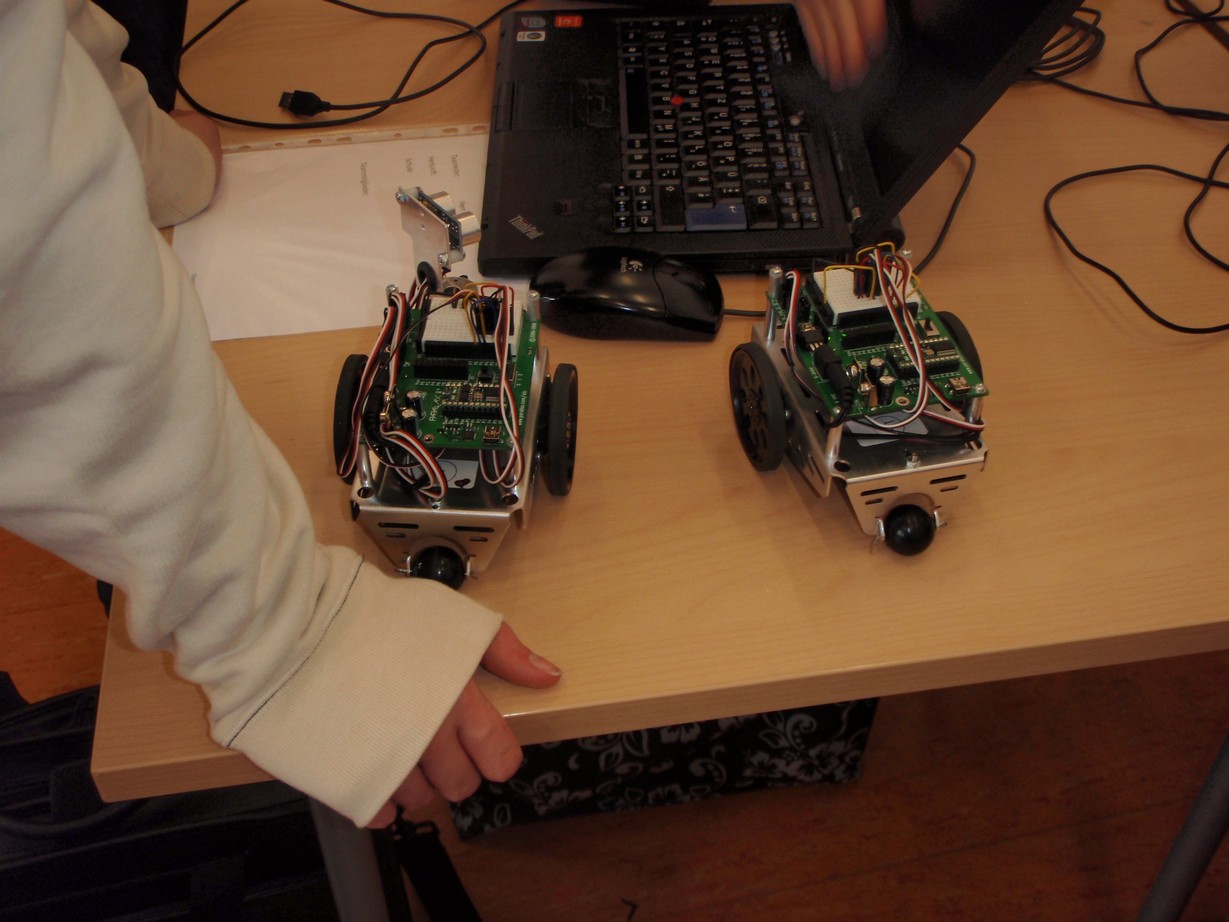
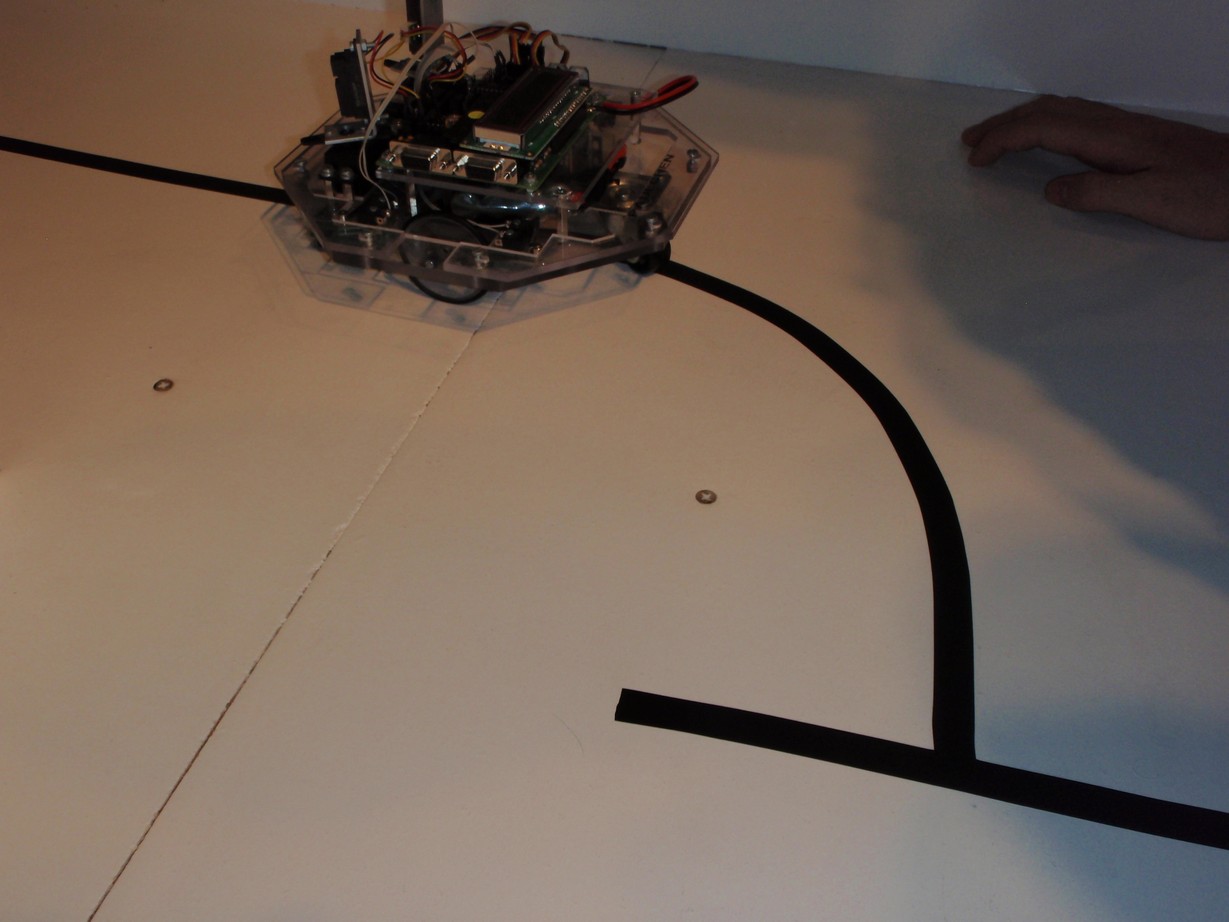
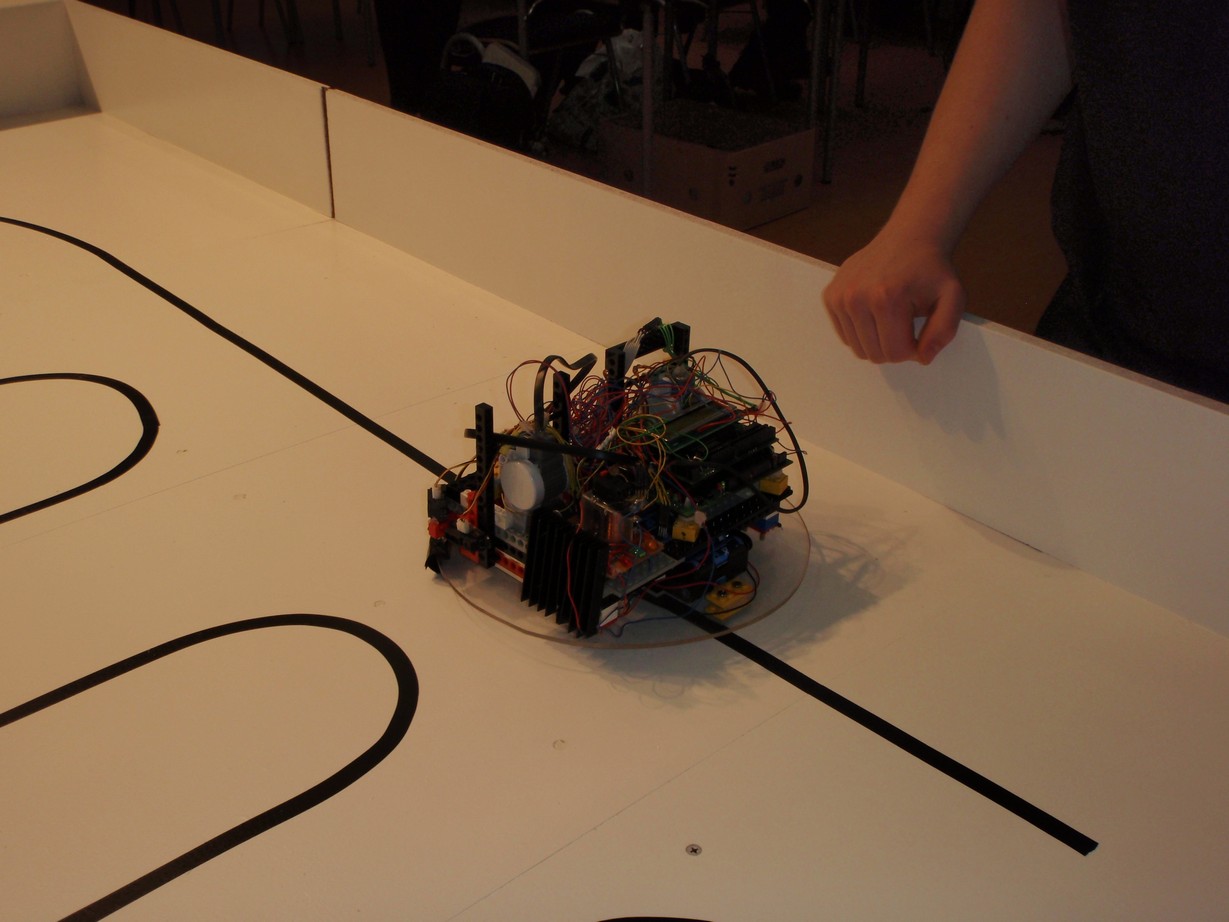
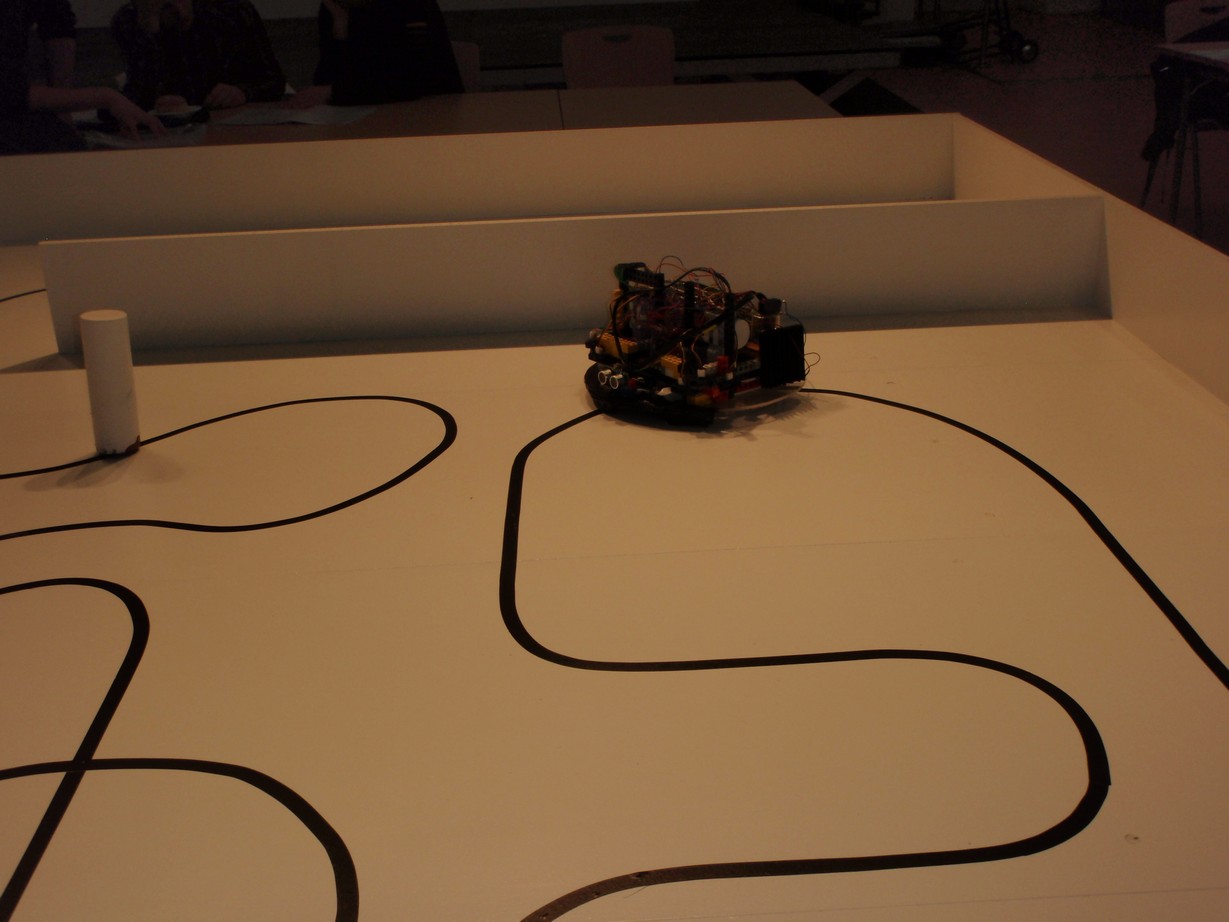
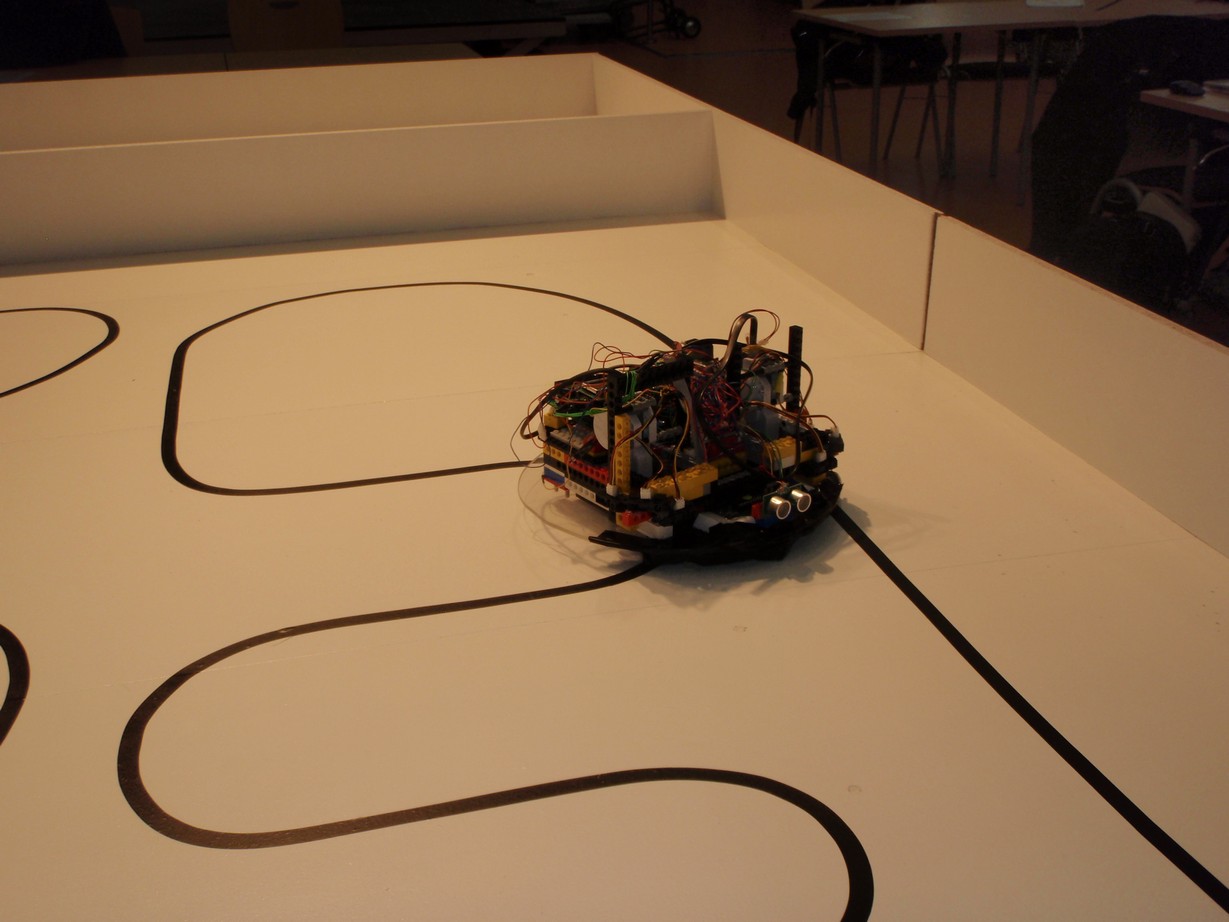
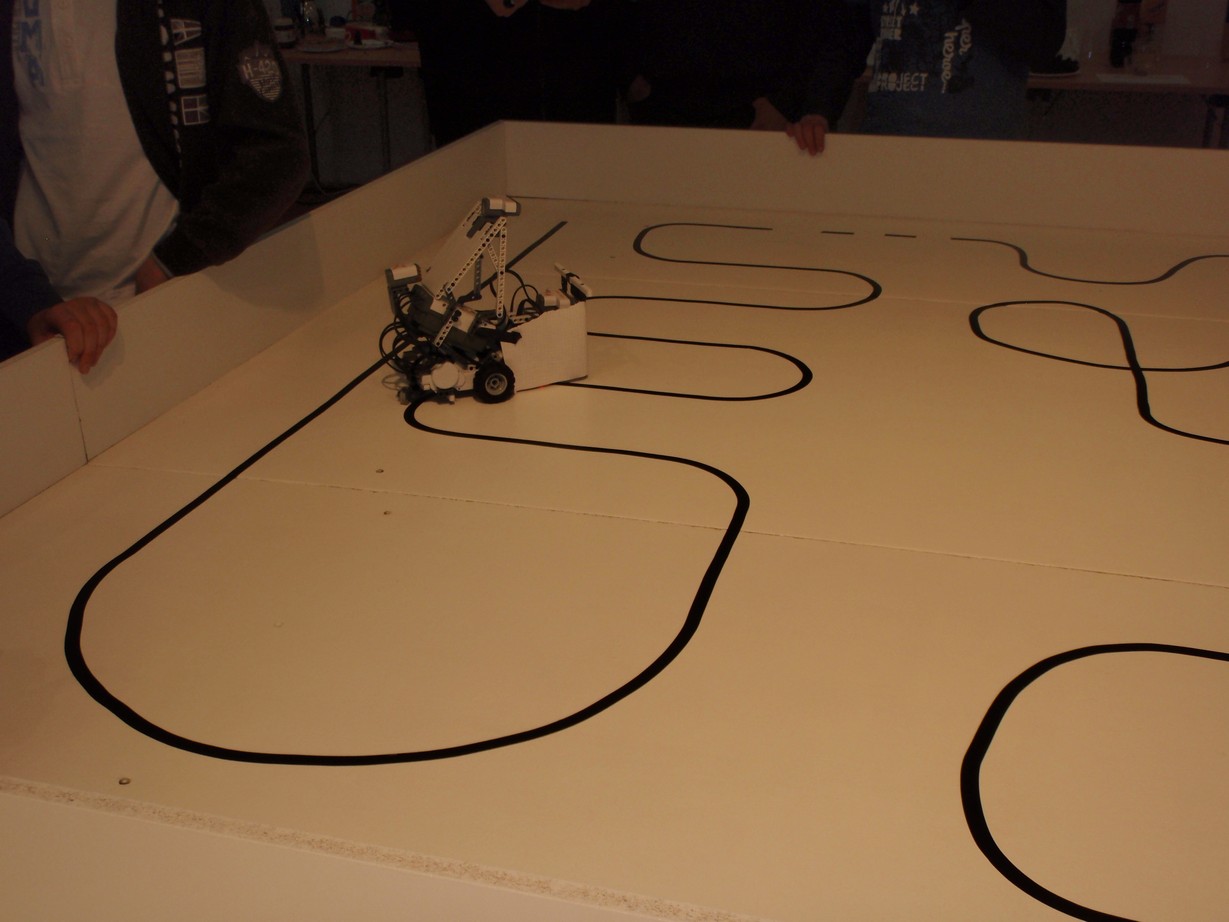
Hier nun zeigte sich erstmals
deutlich, was wir können, aber eben auch, was wir nicht können. Die Hardware
und wohl auch Softwarekomponenten sind besser konfiguriert als jemals zuvor,
aber: Die Spielregeln sind leicht modifiziert worden bzw. standen noch gar
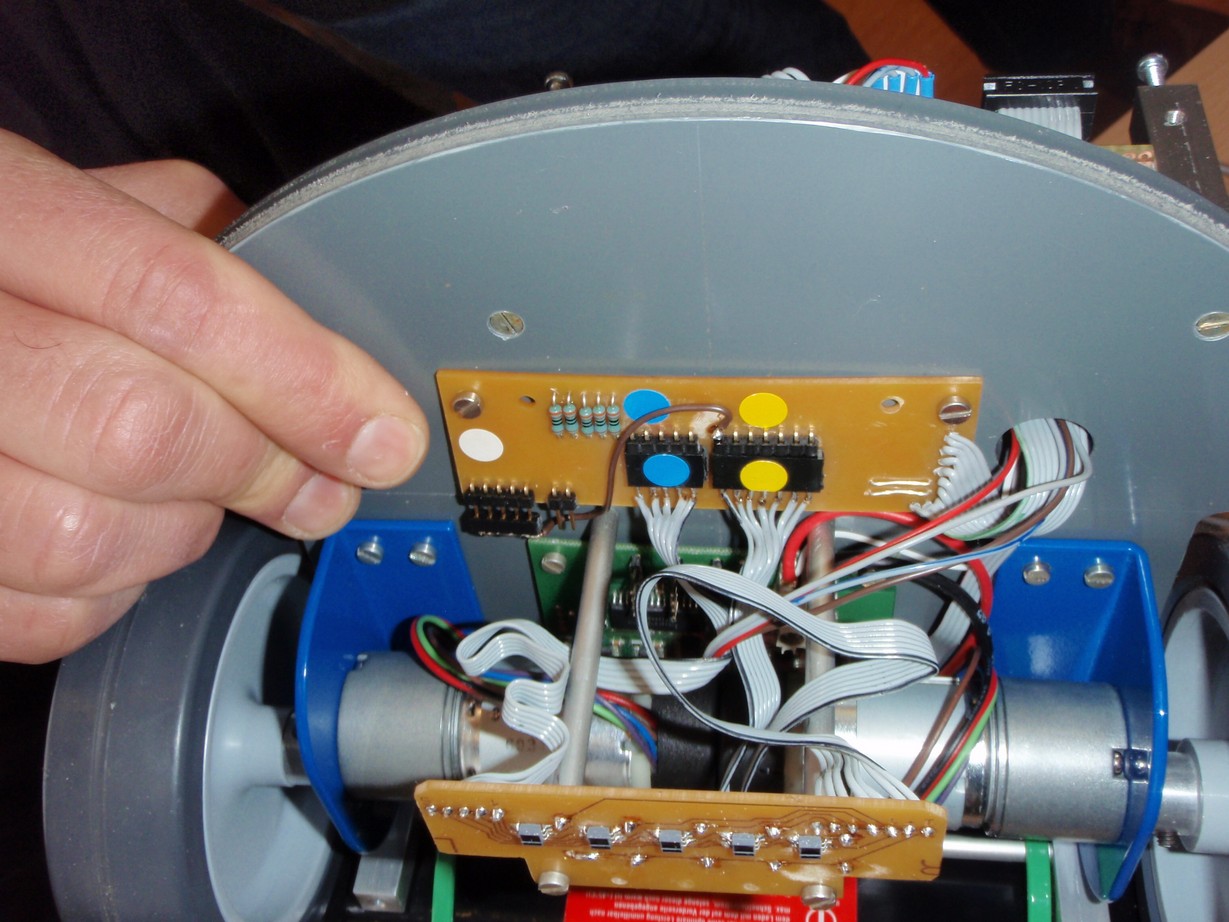
nicht genau fest. Jetzt wissen wir mehr - vor allem, das wir zu groß sind. Schnell zeigte sich aber auch, dass die kleinen fertig konfektionierten Roboter samt ihrer gut eingerichteten und abgeschotteten Meßelektronik sowie hervorragend vorbereiteter Software ernste Konkurrenten sind - die Kleinen sind also erwachsen geworden und funktionieren zwischenzeitlich sehr präzise. Zwar wissen wir mehr von unseren Bausteinen, aber die anderen fahren besser!!! In den nachfolgenden Fotos lässt sich auf Grund der reinen Fülle nicht mehr immer zuordnen, wer wer ist ;-) |
||
|
| 5. RoboSAX-Endrunden-Wettkampf in Chemnitz |
|
|
|
|
|
??? | ||
|
| 6. Verwandte Themen |
|
|
|
|
|
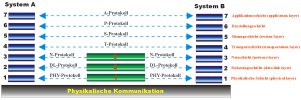
Da unsere Roboter ganz furchtbar viel mit Elektronik, Stromversorgung, Logik, Sensorik, Aktorik und Signalwandlung, aber auch mit Microcontrollern sowie deren Programmierung zu tun haben, können wir hier nun rein theoretisch auf fast jeden Bereich der Informatik verlinken und werden garantiert fündig. Selbst einen Datenübertragung via Schnittstellen ist erforderlich. |
||||||
Bereich Stromversorgung |
|||||||
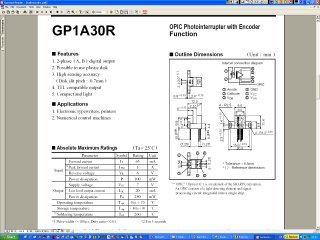
Bereich elektronische Bauelemente |
|||||||
Bereich Mikroprozessor-Technik |
|||||||
Bereich Logik |
|||||||
Bereich Microcomputer und Microcontroller |
|||||||
Bereich Programmierung |
|||||||
Bereich Robotertechnik |
|||||||
Bereich Datenkommunikation |
|||||||
|
|
Bereich Rechentechnik und Betriebssysteme |
|
zur Hauptseite |
© Samuel-von-Pufendorf-Gymnasium Flöha | © Frank Rost am 7. Oktober 2011 um 18.49 Uhr |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) „Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei „f“!“ Diddi Hallervorden, dt. Komiker und Kabarettist |
|
Diese Seite wurde ohne Zusatz irgendwelcher Konversationsstoffe erstellt ;-) |




























{kind=link}